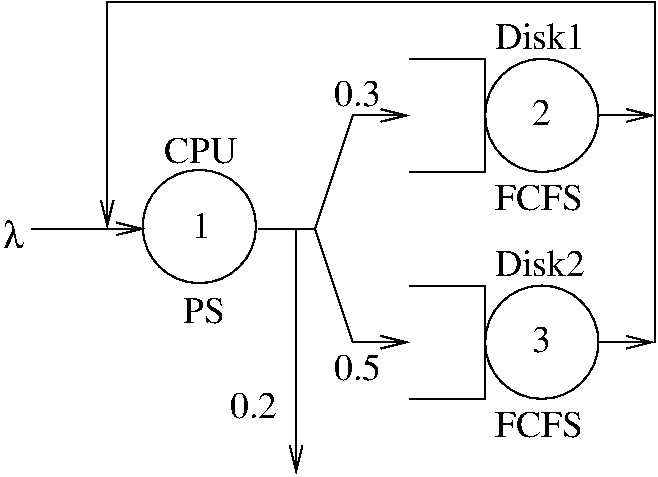
Figure 5.1: Closed network with a single class of requests
Copyright © 2008, 2009, 2010, 2011, 2012, 2013, 2014, 2016, 2018, 2020 Moreno Marzolla.
Permission is granted to make and distribute verbatim copies of this manual provided the copyright notice and this permission notice are preserved on all copies.
Permission is granted to copy and distribute modified versions of this manual under the conditions for verbatim copying, provided that the entire resulting derived work is distributed under the terms of a permission notice identical to this one.
Permission is granted to copy and distribute translations of this manual into another language, under the above conditions for modified versions.
This manual documents how to install and run the Queueing package. It corresponds to version 1.2.7 of the package.
| • Summary: | ||
| • Installation and Getting Started: | Installation of the queueing package. | |
| • Markov Chains: | Functions for Markov chains analysis. | |
| • Single Station Queueing Systems: | Functions for single-station queueing systems. | |
| • Queueing Networks: | Functions for queueing networks analysis. | |
| • References: | References. | |
| • Copying: | The GNU General Public License. | |
| • Concept Index: | An item for each concept. | |
| • Function Index: | An item for each function. |
Next: Installation and Getting Started, Previous: Top, Up: Top [Contents][Index]
| • About the Queueing Package: | What is the Queueing package. | |
| • Contributing Guidelines: | How to contribute. | |
| • Acknowledgments: |
Next: Contributing Guidelines, Up: Summary [Contents][Index]
This document describes the queueing package for GNU Octave
(queueing in short). The queueing package, previously
known as qnetworks toolbox, is a collection of functions for
analyzing queueing networks and Markov chains written for GNU
Octave. Specifically, queueing contains functions for analyzing
Jackson networks, open, closed or mixed product-form BCMP networks,
and computing performance bounds. The following algorithms are
available
queueing
provides functions for analyzing the following types of single-station
queueing systems:
Functions for Markov chain analysis are also provided (discrete- and continuous-time chains are supported):
The queueing package is distributed under the terms of the GNU
General Public License (GPL), version 3 or later
(see Copying). You are encouraged to share this software with
others, and improve this package by contributing additional functions
and reporting bugs. See Contributing Guidelines.
If you use the queueing package in a technical paper, please
cite it as:
Moreno Marzolla, The qnetworks Toolbox: A Software Package for Queueing Networks Analysis. Khalid Al-Begain, Dieter Fiems and William J. Knottenbelt, Editors, Proceedings 17th International Conference on Analytical and Stochastic Modeling Techniques and Applications (ASMTA 2010) Cardiff, UK, June 14–16, 2010, volume 6148 of Lecture Notes in Computer Science, Springer, pp. 102–116, ISBN 978-3-642-13567-5
If you use BibTeX, this is the citation block:
@inproceedings{queueing,
author = {Moreno Marzolla},
title = {The qnetworks Toolbox: A Software Package for Queueing
Networks Analysis},
booktitle = {Analytical and Stochastic Modeling Techniques and
Applications, 17th International Conference,
ASMTA 2010, Cardiff, UK, June 14-16, 2010. Proceedings},
editor = {Khalid Al-Begain and Dieter Fiems and William J. Knottenbelt},
year = {2010},
publisher = {Springer},
series = {Lecture Notes in Computer Science},
volume = {6148},
pages = {102--116},
ee = {http://dx.doi.org/10.1007/978-3-642-13568-2_8},
isbn = {978-3-642-13567-5}
}
An early draft of the paper above is available as Technical Report UBLCS-2010-04, February 2010, Department of Computer Science, University of Bologna, Italy.
Next: Acknowledgments, Previous: About the Queueing Package, Up: Summary [Contents][Index]
Contributions and bug reports are always welcome. If you want
to contribute to the queueing package, here are some
guidelines:
texinfo format, so that it can be extracted and included into
the printable manual. See the existing functions for the documentation
style.
Send your contribution to Moreno Marzolla (moreno.marzolla@unibo.it). If you are a user of this package and find it useful, let me know by dropping me a line. Thanks.
Previous: Contributing Guidelines, Up: Summary [Contents][Index]
The following people (listed alphabetically) contributed to the
queueing package, either by providing feedback, reporting bugs
or contributing code: Philip Carinhas, Phil Colbourn, Diego Didona,
Yves Durand, Marco Guazzone, Dmitry Kolesnikov, Michele Mazzucco,
Marco Paolieri.
Next: Markov Chains, Previous: Summary, Up: Top [Contents][Index]
| • Installation through Octave package management system: | ||
| • Manual installation: | ||
| • Development sources: | ||
| • Naming Conventions: | ||
| • Quick start Guide: |
Next: Manual installation, Up: Installation and Getting Started [Contents][Index]
The most recent version of queueing is 1.2.7 and can
be downloaded from Octave-Forge
https://octave.sourceforge.io/queueing/
Additional information can be found at
http://www.moreno.marzolla.name/software/queueing/
To install queueing, follow these steps:
queueing from Octave command prompt using this
command:
octave:1> pkg install -forge queueing
The command above will download and install the latest version of the
queueing package from Octave Forge, and install it on your
machine.
If you do not have root access, you can perform a local install with:
octave:1> pkg install -local -forge queueing
This will install queueing in your home directory, and the
package will be available to the current user only.
queueing tarball from
Octave-Forge; to install the package in the system-wide location
issue this command at the Octave prompt:
octave:1> pkg install queueing-1.2.7.tar.gz
(you may need to start Octave as root in order to allow the installation to copy the files to the target locations). After this, all functions will be available each time Octave starts, without the need to tweak the search path.
If you do not have root access, you can do a local install using:
octave:1> pkg install -local queueing-1.2.7.tar.gz
queueing package has been succesfully installed; you should see
something like:
octave:1>pkg list queueing
Package Name | Version | Installation directory
--------------+---------+-----------------------
queueing | 1.2.7 | /home/moreno/octave/queueing-1.2.7
queueing is no longer
automatically loaded on Octave start. To make the functions
available for use, you need to issue the command
octave:1>pkg load queueing
at the Octave prompt. To automatically load queueing each time
Octave starts, you can add the command above to the startup script
(usually, ~/.octaverc on Unix systems).
queueing from your system, use the
pkg uninstall command:
octave:1> pkg uninstall queueing
Next: Development sources, Previous: Installation through Octave package management system, Up: Installation and Getting Started [Contents][Index]
If you want to manually install queueing in a custom location,
you can download the tarball and unpack it somewhere:
tar xvfz queueing-1.2.7.tar.gz cd queueing-1.2.7/queueing/
Copy all .m files from the inst/ directory to some
target location. Then, start Octave with the -p option to add
the target location to the search path, so that Octave will find all
queueing functions automatically:
octave -p /path/to/queueing
For example, if all queueing m-files are in
/usr/local/queueing, you can start Octave as follows:
octave -p /usr/local/queueing
If you want, you can add the following line to ~/.octaverc:
addpath("/path/to/queueing");
so that the path /path/to/queueing is automatically added to the search path each time Octave is started, and you no longer need to specify the -p option on the command line.
Next: Naming Conventions, Previous: Manual installation, Up: Installation and Getting Started [Contents][Index]
The source code of the queueing package can be found in the
Mercurial repository at the URL:
https://sourceforge.net/p/octave/queueing/ci/default/tree/
The source distribution contains additional development files that are not present in the installation tarball. This section briefly describes the content of the source tree. This is only relevant for developers who want to modify the code or the documentation.
The source distribution contains the following directories:
Documentation sources. Most of the documentation is extracted from the comment blocks of function files from the inst/ directory.
This directory contains the m-files which implement the
various algorithms provided by queueing. As a notational
convention, the names of functions for Queueing Networks begin with
the ‘qn’ prefix; the name of functions for Continuous-Time Markov
Chains (CTMCs) begin with the ‘ctmc’ prefix, and the names of
functions for Discrete-Time Markov Chains (DTMCs) begin with the
‘dtmc’ prefix.
This directory contains the test scripts used to run all function tests.
This directory contains functions that are either not working properly, or need additional testing before they are moved to the inst/ directory.
The queueing package ships with a Makefile which can be used to
produce the documentation (in PDF and HTML format), and automatically
execute all function tests. The following targets are defined:
allRunning ‘make’ (or ‘make all’) on the top-level directory builds the programs used to extract the documentation from the comments embedded in the m-files, and then produce the documentation in PDF and HTML format (doc/queueing.pdf and doc/queueing.html, respectively).
checkRunning ‘make check’ will execute all tests contained in the m-files. If you modify the code of any function in the inst/ directory, you should run the tests to ensure that no errors have been introduced. You are also encouraged to contribute new tests, especially for functions that are not adequately validated.
cleandistcleandistThe ‘make clean’, ‘make distclean’ and ‘make dist’ commands are used to clean up the source directory and prepare the distribution archive in compressed tar format.
Next: Quick start Guide, Previous: Development sources, Up: Installation and Getting Started [Contents][Index]
Most of the functions in the queueing package obey a common
naming convention. Function names are made of several parts; the first
part is a prefix which indicates the class of problems the function
addresses:
Functions for continuous-time Markov chains
Functions for discrete-time Markov chains
Functions for analyzing single-station queueing systems (individual service centers)
Functions for analyzing queueing networks
Functions dealing with Markov chains start with either the ctmc
or dtmc prefix; the prefix is optionally followed by an
additional string which hints at what the function does:
Birth-Death process
Mean Time to Absorption
First Passage Times
Expected Sojourn Times
Time-Averaged Expected Sojourn Times
For example, function ctmcbd returns the infinitesimal
generator matrix for a continuous birth-death process, while
dtmcbd returns the transition probability matrix for a discrete
birth-death process. Note that there exist functions ctmc and
dtmc (without any suffix) that compute steady-state and
transient state occupancy probabilities for CTMCs and DTMCs,
respectively. See Markov Chains.
Functions whose name starts with qs- deal with single station
queueing systems. The suffix describes the type of system, e.g.,
qsmm1 for M/M/1, qnmmm for M/M/m and so
on. See Single Station Queueing Systems.
Finally, functions whose name starts with qn- deal with
queueing networks. The character that follows indicates whether the
function handles open ('o') or closed ('c') networks,
and whether there is a single customer class ('s') or multiple
classes ('m'). The string mix indicates that the
function supports mixed networks with both open and closed customer
classes.
Open, single-class network: open network with a single class of customers
Open, multiclass network: open network with multiple job classes
Closed, single-class network
Closed, multiclass network
Mixed network with open and closed classes of customers
The last part of the function name indicates the algorithm implemented by the function. See Queueing Networks.
Asymptotic Bounds Analysis
Balanced System Bounds
Geometric Bounds
PB Bounds
Composite Bounds (CB)
Mean Value Analysis (MVA) algorithm
Conditional MVA
MVA with general load-dependent servers
Approximate MVA
MVABLO approximation for blocking queueing networks
Convolution algorithm
Convolution algorithm with general load-dependent servers
Some deprecated functions may be present in the queueing
package; generally, these are functions that have been renamed, and
the old name is kept for a while for backward compatibility.
Deprecated functions are not documented and will be removed in future
releases. Calling a deprecated functions displays a warning message
that appears only once per session. The warning message can be turned
off with the command:
octave:1> warning ("off", "qn:deprecated-function");
However, you are strongly recommended to update your code to the new API. To help catching usages of deprecated functions, you can transform warnings into errors so that your application stops immediately:
octave:1> warning ("error", "qn:deprecated-function");
Previous: Naming Conventions, Up: Installation and Getting Started [Contents][Index]
You can use all functions by simply invoking their name with the
appropriate parameters; an error is shown in case of missing/wrong
parameters. Extensive documentation is provided for each function, and
can be displayed with the help command. For example:
octave:2> help qncsmvablo
shows the documentation for the qncsmvablo function.
Additional information can be found in the queueing manual,
that is available in PDF format in doc/queueing.pdf and in HTML
format in doc/queueing.html.
Many functions have demo blocks showing usage examples. To execute the
demos for the qnclosed function, use the demo
command:
octave:4> demo qnclosed
We now illustrate a few examples of how the queueing package
can be used. More examples are provided in the manual.
Example 1 Compute the stationary state occupancy probabilities of a continuous-time Markov chain with infinitesimal generator matrix
/ -0.8 0.6 0.2 \
Q = | 0.3 -0.7 0.4 |
\ 0.2 0.2 -0.4 /
Q = [ -0.8 0.6 0.2; \
0.3 -0.7 0.4; \
0.2 0.2 -0.4 ];
q = ctmc(Q)
⇒ q = 0.23256 0.32558 0.44186
Example 2 Compute the transient state occupancy probability after n=3 transitions of a three state discrete-time birth-death process, with birth probabilities \lambda_{01} = 0.3 and \lambda_{12} = 0.5 and death probabilities \mu_{10} = 0.5 and \mu_{21} = 0.7, assuming that the system is initially in state zero (i.e., the initial state occupancy probabilities are [1, 0, 0]).
n = 3;
p0 = [1 0 0];
P = dtmcbd( [0.3 0.5], [0.5 0.7] );
p = dtmc(P,n,p0)
⇒ p = 0.55300 0.29700 0.15000
Example 3 Compute server utilization, response time, mean number of requests and throughput of a closed queueing network with N=4 requests and three M/M/1–FCFS queues with mean service times S = [1.0, 0.8, 1.4] and average number of visits V = [1.0, 0.8, 0.8]
S = [1.0 0.8 1.4];
V = [1.0 0.8 0.8];
N = 4;
[U R Q X] = qncsmva(N, S, V)
⇒
U = 0.70064 0.44841 0.78471
R = 2.1030 1.2642 3.2433
Q = 1.47346 0.70862 1.81792
X = 0.70064 0.56051 0.56051
Example 4 Compute server utilization, response time, mean number of requests and throughput of an open queueing network with three M/M/1–FCFS queues with mean service times S = [1.0, 0.8, 1.4] and average number of visits V = [1.0, 0.8, 0.8]. The overall arrival rate is \lambda = 0.8 requests/second.
S = [1.0 0.8 1.4];
V = [1.0 0.8 0.8];
lambda = 0.8;
[U R Q X] = qnos(lambda, S, V)
⇒
U = 0.80000 0.51200 0.89600
R = 5.0000 1.6393 13.4615
Q = 4.0000 1.0492 8.6154
X = 0.80000 0.64000 0.64000
Next: Single Station Queueing Systems, Previous: Installation and Getting Started, Up: Top [Contents][Index]
| • Discrete-Time Markov Chains: | ||
| • Continuous-Time Markov Chains: |
Next: Continuous-Time Markov Chains, Up: Markov Chains [Contents][Index]
Let X_0, X_1, …, X_n, … be a sequence of random variables defined over the discrete state space 1, 2, …. The sequence X_0, X_1, …, X_n, … is a stochastic process with discrete time 0, 1, 2, …. A Markov chain is a stochastic process {X_n, n=0, 1, …} which satisfies the following Markov property:
P(X_{n+1} = x_{n+1} | X_n = x_n, X_{n-1} = x_{n-1}, …, X_0 = x_0) = P(X_{n+1} = x_{n+1} | X_n = x_n)
which basically means that the probability that the system is in a particular state at time n+1 only depends on the state the system was at time n.
The evolution of a Markov chain with finite state space {1, …, N} can be fully described by a stochastic matrix {\bf P}(n) = [ P_{i,j}(n) ] where P_{i, j}(n) = P( X_{n+1} = j\ |\ X_n = i ). If the Markov chain is homogeneous (that is, the transition probability matrix {\bf P}(n) is time-independent), we can write {\bf P} = [P_{i, j}], where P_{i, j} = P( X_{n+1} = j\ |\ X_n = i ) for all n=0, 1, ….
The transition probability matrix \bf P must be a stochastic matrix, meaning that it must satisfy the following two properties:
Property 1 requires that all probabilities are nonnegative; property 2 requires that the outgoing transition probabilities from any state i sum to one.
Check whether P is a valid transition probability matrix.
If P is valid, r is the size (number of rows or columns) of P. If P is not a transition probability matrix, r is set to zero, and err to an appropriate error string.
A DTMC is irreducible if every state can be reached with non-zero probability starting from every other state.
Check if P is irreducible, and identify Strongly Connected Components (SCC) in the transition graph of the DTMC with transition matrix P.
INPUTS
P(i,j)transition probability from state i to state j. P must be an N \times N stochastic matrix.
OUTPUTS
r1 if P is irreducible, 0 otherwise (scalar)
s(i)strongly connected component (SCC) that state i belongs to
(vector of length N). SCCs are numbered 1, 2, ….
The number of SCCs is max(s). If the graph is
strongly connected, then there is a single SCC and the predicate
all(s == 1) evaluates to true
Next: Birth-death process (DTMC), Up: Discrete-Time Markov Chains [Contents][Index]
Given a discrete-time Markov chain with state space {1, …, N}, we denote with {\bf \pi}(n) = \left[\pi_1(n), … \pi_N(n) \right] the state occupancy probability vector at step n = 0, 1, …. \pi_i(n) is the probability that the system is in state i after n transitions.
Given the transition probability matrix \bf P and the initial state occupancy probability vector {\bf \pi}(0) = \left[\pi_1(0), …, \pi_N(0)\right], {\bf \pi}(n) can be computed as:
\pi(n) = \pi(0) P^n
Under certain conditions, there exists a stationary state occupancy probability {\bf \pi} = \lim_{n \rightarrow +\infty} {\bf \pi}(n), which is independent from {\bf \pi}(0). The vector \bf \pi is the solution of the following linear system:
/ | \pi P = \pi | \pi 1^T = 1 \
where \bf 1 is the row vector of ones, and ( \cdot )^T the transpose operator.
Compute stationary or transient state occupancy probabilities for a discrete-time Markov chain.
With a single argument, compute the stationary state occupancy
probabilities p(1), …, p(N) for a
discrete-time Markov chain with finite state space {1, …,
N} and with N \times N transition matrix
P. With three arguments, compute the transient state occupancy
probabilities p(1), …, p(N) that the system is in
state i after n steps, given initial occupancy
probabilities p0(1), …, p0(N).
INPUTS
P(i,j)transition probabilities from state i to state j. P must be an N \times N irreducible stochastic matrix, meaning that the sum of each row must be 1 (\sum_{j=1}^N P_{i, j} = 1), and the rank of P must be N.
nNumber of transitions after which state occupancy probabilities are computed (scalar, n ≥ 0)
p0(i)probability that at step 0 the system is in state i (vector of length N).
OUTPUTS
p(i)If this function is called with a single argument, p(i)
is the steady-state probability that the system is in state i.
If this function is called with three arguments, p(i)
is the probability that the system is in state i
after n transitions, given the probabilities
p0(i) that the initial state is i.
See also: ctmc.
EXAMPLE
The following example is from GrSn97. Let us consider a maze with nine rooms, as shown in the following figure
+-----+-----+-----+ | | | | | 1 2 3 | | | | | +- -+- -+- -+ | | | | | 4 5 6 | | | | | +- -+- -+- -+ | | | | | 7 8 9 | | | | | +-----+-----+-----+
A mouse is placed in one of the rooms and can wander around. At each step, the mouse moves from the current room to a neighboring one with equal probability. For example, if it is in room 1, it can move to room 2 and 4 with probability 1/2, respectively; if the mouse is in room 8, it can move to either 7, 5 or 9 with probability 1/3.
The transition probabilities P_{i, j} from room i to room j can be summarized in the following matrix:
/ 0 1/2 0 1/2 0 0 0 0 0 \
| 1/3 0 1/3 0 1/3 0 0 0 0 |
| 0 1/2 0 0 0 1/2 0 0 0 |
| 1/3 0 0 0 1/3 0 1/3 0 0 |
P = | 0 1/4 0 1/4 0 1/4 0 1/4 0 |
| 0 0 1/3 0 1/3 0 0 0 1/3 |
| 0 0 0 1/2 0 0 0 1/2 0 |
| 0 0 0 0 1/3 0 1/3 0 1/3 |
\ 0 0 0 0 0 1/2 0 1/2 0 /
The stationary state occupancy probabilities can then be computed with the following code:
P = zeros(9,9); P(1,[2 4] ) = 1/2; P(2,[1 5 3] ) = 1/3; P(3,[2 6] ) = 1/2; P(4,[1 5 7] ) = 1/3; P(5,[2 4 6 8]) = 1/4; P(6,[3 5 9] ) = 1/3; P(7,[4 8] ) = 1/2; P(8,[7 5 9] ) = 1/3; P(9,[6 8] ) = 1/2; p = dtmc(P); disp(p)
⇒ 0.083333 0.125000 0.083333 0.125000
0.166667 0.125000 0.083333 0.125000
0.083333
Next: Expected number of visits (DTMC), Previous: State occupancy probabilities (DTMC), Up: Discrete-Time Markov Chains [Contents][Index]
Returns the transition probability matrix P for a discrete
birth-death process over state space {1, …, N}.
For each i=1, …, (N-1),
b(i) is the transition probability from state
i to (i+1), and d(i) is the transition
probability from state (i+1) to i.
Matrix \bf P is defined as:
/ \ | 1-b(1) b(1) | | d(1) (1-d(1)-b(2)) b(2) | | d(2) (1-d(2)-b(3)) b(3) | | | | ... ... ... | | | | d(N-2) (1-d(N-2)-b(N-1)) b(N-1) | | d(N-1) 1-d(N-1) | \ /
where \lambda_i and \mu_i are the birth and death probabilities, respectively.
See also: ctmcbd.
Next: Time-averaged expected sojourn times (DTMC), Previous: Birth-death process (DTMC), Up: Discrete-Time Markov Chains [Contents][Index]
Given a N state discrete-time Markov chain with transition matrix \bf P and an integer n ≥ 0, we let L_i(n) be the the expected number of visits to state i during the first n transitions. The vector {\bf L}(n) = \left[ L_1(n), …, L_N(n) \right] is defined as
n n
___ ___
\ \ i
L(n) = > pi(i) = > pi(0) P
/___ /___
i=0 i=0
where {\bf \pi}(i) = {\bf \pi}(0){\bf P}^i is the state occupancy probability after i transitions, and {\bf \pi}(0) = \left[\pi_1(0), …, \pi_N(0) \right] are the initial state occupancy probabilities.
If \bf P is absorbing, i.e., the stochastic process eventually enters a state with no outgoing transitions, then we can compute the expected number of visits until absorption \bf L. To do so, we first rearrange the states by rewriting \bf P as
/ Q | R \
P = |---+---|
\ 0 | I /
where the first t states are transient and the last r states are absorbing (t+r = N). The matrix {\bf N} = ({\bf I} - {\bf Q})^{-1} is called the fundamental matrix; N_{i,j} is the expected number of times the process is in the j-th transient state assuming it started in the i-th transient state. If we reshape \bf N to the size of \bf P (filling missing entries with zeros), we have that, for absorbing chains, {\bf L} = {\bf \pi}(0){\bf N}.
Compute the expected number of visits to each state during the first n transitions, or until abrosption.
INPUTS
P(i,j)N \times N transition matrix. P(i,j) is the
transition probability from state i to state j.
nNumber of steps during which the expected number of visits are
computed (n ≥ 0). If n=0, returns
p0. If n > 0, returns the expected number of
visits after exactly n transitions.
p0(i)Initial state occupancy probabilities; p0(i) is
the probability that the system is in state i at step 0.
OUTPUTS
L(i)When called with two arguments, L(i) is the expected
number of visits to state i before absorption. When
called with three arguments, L(i) is the expected number
of visits to state i during the first n transitions.
REFERENCES
See also: ctmcexps.
Next: Mean time to absorption (DTMC), Previous: Expected number of visits (DTMC), Up: Discrete-Time Markov Chains [Contents][Index]
Compute the time-averaged sojourn times M(i),
defined as the fraction of time spent in state i during the
first n transitions (or until absorption), assuming that the
state occupancy probabilities at time 0 are p0.
INPUTS
P(i,j)N \times N transition probability matrix.
nNumber of transitions during which the time-averaged expected sojourn times are computed (scalar, n ≥ 0). if n = 0, returns p0.
p0(i)Initial state occupancy probabilities (vector of length N).
OUTPUTS
M(i)If this function is called with three arguments, M(i) is
the expected fraction of steps {0, …, n} spent in
state i, assuming that the state occupancy probabilities at
time zero are p0. If this function is called with two
arguments, M(i) is the expected fraction of steps spent
in state i until absorption. M is a vector of length
N.
See also: dtmcexps.
Next: First passage times (DTMC), Previous: Time-averaged expected sojourn times (DTMC), Up: Discrete-Time Markov Chains [Contents][Index]
The mean time to absorption is defined as the average number of transitions that are required to enter an absorbing state, starting from a transient state or given initial state occupancy probabilities {\bf \pi}(0).
Let t_i be the expected number of transitions before being absorbed in any absorbing state, starting from state i. The vector {\bf t} = [t_1, …, t_N] can be computed from the fundamental matrix \bf N (see Expected number of visits (DTMC)) as
t = N c
where \bf c is a column vector of 1’s.
Let {\bf B} = [ B_{i, j} ] be a matrix where B_{i, j} is the probability of being absorbed in state j, starting from transient state i. Again, using matrices \bf N and \bf R (see Expected number of visits (DTMC)) we can write
B = N R
Compute the expected number of steps before absorption for a DTMC with state space {1, …, N} and transition probability matrix P.
INPUTS
P(i,j)N \times N transition probability matrix.
P(i,j) is the transition probability from state
i to state j.
p0(i)Initial state occupancy probabilities (vector of length N).
OUTPUTS
tt(i)When called with a single argument, t is a vector of length
N such that t(i) is the expected number of steps
before being absorbed in any absorbing state, starting from state
i; if i is absorbing, t(i) = 0. When
called with two arguments, t is a scalar, and represents the
expected number of steps before absorption, starting from the initial
state occupancy probability p0.
N(i)N(i,j)When called with a single argument, N is the N \times N
fundamental matrix for P. N(i,j) is the expected
number of visits to transient state j before absorption, if the
system started in transient state i. The initial state is counted
if i = j. When called with two arguments, N is a vector
of length N such that N(j) is the expected number
of visits to transient state j before absorption, given initial
state occupancy probability P0.
B(i)B(i,j)When called with a single argument, B is a N \times N
matrix where B(i,j) is the probability of being
absorbed in state j, starting from transient state i;
if j is not absorbing, B(i,j) = 0; if i
is absorbing, B(i,i) = 1 and B(i,j) = 0
for all i \neq j. When called with two arguments, B is
a vector of length N where B(j) is the
probability of being absorbed in state j, given initial state
occupancy probabilities p0.
REFERENCES
See also: ctmcmtta.
Previous: Mean time to absorption (DTMC), Up: Discrete-Time Markov Chains [Contents][Index]
The First Passage Time M_{i, j} is the average number of transitions needed to enter state j for the first time, starting from state i. Matrix \bf M satisfies the property
___
\
M_ij = 1 + > P_ij * M_kj
/___
k!=j
To compute {\bf M} = [ M_{i, j}] a different formulation is used. Let \bf W be the N \times N matrix having each row equal to the stationary state occupancy probability vector \bf \pi for \bf P; let \bf I be the N \times N identity matrix (i.e., the matrix of all ones). Define \bf Z as follows:
-1 Z = (I - P + W)
Then, we have that
Z_jj - Z_ij
M_ij = -----------
\pi_j
According to the definition above, M_{i,i} = 0. We arbitrarily set M_{i,i} to the mean recurrence time r_i for state i, that is the average number of transitions needed to return to state i starting from it. r_i is:
1
r_i = -----
\pi_i
Compute mean first passage times and mean recurrence times for an irreducible discrete-time Markov chain over the state space {1, …, N}.
INPUTS
P(i,j)transition probability from state i to state j. P must be an irreducible stochastic matrix, which means that the sum of each row must be 1 (\sum_{j=1}^N P_{i j} = 1), and the rank of P must be N.
OUTPUTS
M(i,j)For all 1 ≤ i, j ≤ N, i \neq j, M(i,j) is
the average number of transitions before state j is entered
for the first time, starting from state i.
M(i,i) is the mean recurrence time of state
i, and represents the average time needed to return to state
i.
REFERENCES
See also: ctmcfpt.
Previous: Discrete-Time Markov Chains, Up: Markov Chains [Contents][Index]
A stochastic process {X(t), t ≥ 0} is a continuous-time Markov chain if, for all integers n, and for any sequence t_0, t_1 , …, t_n, t_{n+1} such that t_0 < t_1 < … < t_n < t_{n+1}, we have
P(X_{n+1} = x_{n+1} | X_n = x_n, X_{n-1} = x_{n-1}, ..., X_0 = x_0) = P(X_{n+1} = x_{n+1} | X_n = x_n)
A continuous-time Markov chain is defined according to an infinitesimal generator matrix {\bf Q} = [Q_{i,j}], where for each i \neq j, Q_{i, j} is the transition rate from state i to state j. The matrix \bf Q must satisfy the property that, for all i, \sum_{j=1}^N Q_{i, j} = 0.
If Q is a valid infinitesimal generator matrix, return the size (number of rows or columns) of Q. If Q is not an infinitesimal generator matrix, set result to zero, and err to an appropriate error string.
Similarly to the DTMC case, a CTMC is irreducible if every state is eventually reachable from every other state in finite time.
Check if Q is irreducible, and identify Strongly Connected Components (SCC) in the transition graph of the DTMC with infinitesimal generator matrix Q.
INPUTS
Q(i,j)Infinitesimal generator matrix. Q is a N \times N square
matrix where Q(i,j) is the transition rate from state
i to state j, for 1 ≤ i, j ≤ N,
i \neq j.
OUTPUTS
r1 if Q is irreducible, 0 otherwise.
s(i)strongly connected component (SCC) that state i belongs to.
SCCs are numbered 1, 2, …. If the graph is strongly
connected, then there is a single SCC and the predicate all(s == 1)
evaluates to true.
Next: Birth-death process (CTMC), Up: Continuous-Time Markov Chains [Contents][Index]
Similarly to the discrete case, we denote with {\bf \pi}(t) = \left[\pi_1(t), …, \pi_N(t) \right] the state occupancy probability vector at time t. \pi_i(t) is the probability that the system is in state i at time t ≥ 0.
Given the infinitesimal generator matrix \bf Q and initial state occupancy probabilities {\bf \pi}(0) = \left[\pi_1(0), …, \pi_N(0)\right], the occupancy probabilities {\bf \pi}(t) at time t can be computed as:
\pi(t) = \pi(0) exp(Qt)
where \exp( {\bf Q} t ) is the matrix exponential of {\bf Q} t. Under certain conditions, there exists a stationary state occupancy probability {\bf \pi} = \lim_{t \rightarrow +\infty} {\bf \pi}(t) that is independent from {\bf \pi}(0). \bf \pi is the solution of the following linear system:
/ | \pi Q = 0 | \pi 1^T = 1 \
Compute stationary or transient state occupancy probabilities for a continuous-time Markov chain.
With a single argument, compute the stationary state occupancy probabilities p(1), …, p(N) for a continuous-time Markov chain with finite state space {1, …, N} and N \times N infinitesimal generator matrix Q. With three arguments, compute the state occupancy probabilities p(1), …, p(N) that the system is in state i at time t, given initial state occupancy probabilities p0(1), …, p0(N) at time 0.
INPUTS
Q(i,j)Infinitesimal generator matrix. Q is a N \times N square
matrix where Q(i,j) is the transition rate from state
i to state j, for 1 ≤ i \neq j ≤ N.
Q must satisfy the property that \sum_{j=1}^N Q_{i, j} =
0
tTime at which to compute the transient probability (t ≥ 0). If omitted, the function computes the steady state occupancy probability vector.
p0(i)probability that the system is in state i at time 0.
OUTPUTS
p(i)If this function is invoked with a single argument, p(i)
is the steady-state probability that the system is in state i,
i = 1, …, N. If this function is invoked with three
arguments, p(i) is the probability that the system is in
state i at time t, given the initial occupancy
probabilities p0(1), …, p0(N).
See also: dtmc.
EXAMPLE
Consider a two-state CTMC where all transition rates between states are equal to 1. The stationary state occupancy probabilities can be computed as follows:
Q = [ -1 1; ...
1 -1 ];
q = ctmc(Q)
⇒ q = 0.50000 0.50000
Next: Expected sojourn times (CTMC), Previous: State occupancy probabilities (CTMC), Up: Continuous-Time Markov Chains [Contents][Index]
Returns the infinitesimal generator matrix Q for a
continuous birth-death process over the finite state space
{1, …, N}. For each i=1, …, (N-1),
b(i) is the transition rate from state i to
state (i+1), and d(i) is the transition rate from state
(i+1) to state i.
Matrix \bf Q is therefore defined as:
/ \ | -b(1) b(1) | | d(1) -(d(1)+b(2)) b(2) | | d(2) -(d(2)+b(3)) b(3) | | | | ... ... ... | | | | d(N-2) -(d(N-2)+b(N-1)) b(N-1) | | d(N-1) -d(N-1) | \ /
where \lambda_i and \mu_i are the birth and death rates, respectively.
See also: dtmcbd.
Next: Time-averaged expected sojourn times (CTMC), Previous: Birth-death process (CTMC), Up: Continuous-Time Markov Chains [Contents][Index]
Given a N state continuous-time Markov Chain with infinitesimal generator matrix \bf Q, we define the vector {\bf L}(t) = \left[L_1(t), …, L_N(t)\right] such that L_i(t) is the expected sojourn time in state i during the interval [0,t), assuming that the initial occupancy probabilities at time 0 were {\bf \pi}(0). {\bf L}(t) can be expressed as the solution of the following differential equation:
dL --(t) = L(t) Q + pi(0), L(0) = 0 dt
Alternatively, {\bf L}(t) can also be expressed in integral form as:
/ t
L(t) = | pi(u) du
/ 0
where {\bf \pi}(t) = {\bf \pi}(0) \exp({\bf Q}t) is the state occupancy probability at time t; \exp({\bf Q}t) is the matrix exponential of {\bf Q}t.
If there are absorbing states, we can define the vector of expected sojourn times until absorption {\bf L}(\infty), where for each transient state i, L_i(\infty) is the expected total time spent in state i until absorption, assuming that the system started with given state occupancy probabilities {\bf \pi}(0). Let \tau be the set of transient (i.e., non absorbing) states; let {\bf Q}_\tau be the restriction of \bf Q to the transient sub-states only. Similarly, let {\bf \pi}_\tau(0) be the restriction of the initial state occupancy probability vector {\bf \pi}(0) to transient states \tau.
The expected time to absorption {\bf L}_\tau(\infty) is defined as the solution of the following equation:
L_T( inf ) Q_T = -pi_T(0)
With three arguments, compute the expected times L(i)
spent in each state i during the time interval [0,t],
assuming that the initial occupancy vector is p. With two
arguments, compute the expected time L(i) spent in each
transient state i until absorption.
Note: In its current implementation, this function requires that an absorbing state is reachable from any non-absorbing state of Q.
INPUTS
Q(i,j)N \times N infinitesimal generator matrix. Q(i,j)
is the transition rate from state i to state j,
1 ≤ i, j ≤ N, i \neq j.
The matrix Q must also satisfy the
condition \sum_{j=1}^N Q_{i,j} = 0 for every i=1, …, N.
tIf given, compute the expected sojourn times in [0,t]
p(i)Initial occupancy probability vector; p(i) is the
probability the system is in state i at time 0, i = 1,
…, N
OUTPUTS
L(i)If this function is called with three arguments, L(i) is
the expected time spent in state i during the interval
[0,t]. If this function is called with two arguments
L(i) is the expected time spent in transient state
i until absorption; if state i is absorbing,
L(i) is zero.
See also: dtmcexps.
EXAMPLE
Let us consider a 4-states pure birth continuous process where the transition rate from state i to state (i+1) is \lambda_i = i \lambda (i=1, 2, 3), with \lambda = 0.5. The following code computes the expected sojourn time for each state i, given initial occupancy probabilities {\bf \pi}_0=[1, 0, 0, 0].
lambda = 0.5;
N = 4;
b = lambda*[1:N-1];
d = zeros(size(b));
Q = ctmcbd(b,d);
t = linspace(0,10,100);
p0 = zeros(1,N); p0(1)=1;
L = zeros(length(t),N);
for i=1:length(t)
L(i,:) = ctmcexps(Q,t(i),p0);
endfor
plot( t, L(:,1), ";State 1;", "linewidth", 2, ...
t, L(:,2), ";State 2;", "linewidth", 2, ...
t, L(:,3), ";State 3;", "linewidth", 2, ...
t, L(:,4), ";State 4;", "linewidth", 2 );
legend("location","northwest"); legend("boxoff");
xlabel("Time");
ylabel("Expected sojourn time");
Next: Mean time to absorption (CTMC), Previous: Expected sojourn times (CTMC), Up: Continuous-Time Markov Chains [Contents][Index]
Compute the time-averaged sojourn time M(i),
defined as the fraction of the time interval [0,t] (or until
absorption) spent in state i, assuming that the state
occupancy probabilities at time 0 are p.
INPUTS
Q(i,j)Infinitesimal generator matrix. Q(i,j) is the transition
rate from state i to state j,
1 ≤ i,j ≤ N, i \neq j. The
matrix Q must also satisfy the condition \sum_{j=1}^N Q_{i,j} = 0
tTime. If omitted, the results are computed until absorption.
p0(i)initial state occupancy probabilities. p0(i) is the
probability that the system is in state i at time 0, i
= 1, …, N
OUTPUTS
M(i)When called with three arguments, M(i) is the expected
fraction of the interval [0,t] spent in state i
assuming that the state occupancy probability at time zero is
p. When called with two arguments, M(i) is the
expected fraction of time until absorption spent in state i;
in this case the mean time to absorption is sum(M).
See also: ctmcexps.
EXAMPLE
lambda = 0.5;
N = 4;
birth = lambda*linspace(1,N-1,N-1);
death = zeros(1,N-1);
Q = diag(birth,1)+diag(death,-1);
Q -= diag(sum(Q,2));
t = linspace(1e-5,30,100);
p = zeros(1,N); p(1)=1;
M = zeros(length(t),N);
for i=1:length(t)
M(i,:) = ctmctaexps(Q,t(i),p);
endfor
clf;
plot(t, M(:,1), ";State 1;", "linewidth", 2, ...
t, M(:,2), ";State 2;", "linewidth", 2, ...
t, M(:,3), ";State 3;", "linewidth", 2, ...
t, M(:,4), ";State 4 (absorbing);", "linewidth", 2 );
legend("location","east"); legend("boxoff");
xlabel("Time");
ylabel("Time-averaged Expected sojourn time");
Next: First passage times (CTMC), Previous: Time-averaged expected sojourn times (CTMC), Up: Continuous-Time Markov Chains [Contents][Index]
Compute the Mean-Time to Absorption (MTTA) of the CTMC described by the infinitesimal generator matrix Q, starting from initial occupancy probabilities p. If there are no absorbing states, this function fails with an error.
INPUTS
Q(i,j)N \times N infinitesimal generator matrix. Q(i,j)
is the transition rate from state i to state j, i
\neq j. The matrix Q must satisfy the condition
\sum_{j=1}^N Q_{i,j} = 0
p(i)probability that the system is in state i at time 0, for each i=1, …, N
OUTPUTS
tMean time to absorption of the process represented by matrix Q. If there are no absorbing states, this function fails.
REFERENCES
See also: ctmcexps.
EXAMPLE
Let us consider a simple model of redundant disk array. We assume that the array is made of 5 independent disks and can tolerate up to 2 disk failures without losing data. If three or more disks break, the array is dead and unrecoverable. We want to estimate the Mean-Time-To-Failure (MTTF) of the disk array.
We model this system as a 4 states continuous Markov chain with state space { 2, 3, 4, 5 }. In state i there are exactly i active (i.e., non failed) disks; state 2 is absorbing. Let \mu be the failure rate of a single disk. The system starts in state 5 (all disks are operational). We use a pure death process, where the death rate from state i to state (i-1) is \mu i, for i = 3, 4, 5).
The MTTF of the disk array is the MTTA of the Markov Chain, and can be computed as follows:
mu = 0.01; death = [ 3 4 5 ] * mu; birth = 0*death; Q = ctmcbd(birth,death); t = ctmcmtta(Q,[0 0 0 1])
⇒ t = 78.333
Previous: Mean time to absorption (CTMC), Up: Continuous-Time Markov Chains [Contents][Index]
Compute mean first passage times for an irreducible continuous-time Markov chain.
INPUTS
Q(i,j)Infinitesimal generator matrix. Q is a N \times N
square matrix where Q(i,j) is the transition rate from
state i to state j, for 1 ≤ i, j ≤ N,
i \neq j. Transition rates must be nonnegative, and
\sum_{j=1}^N Q_{i,j} = 0
iInitial state.
jDestination state.
OUTPUTS
M(i,j)average time before state
j is visited for the first time, starting from state i.
We let M(i,i) = 0.
mm is the average time before state j is visited for the first time, starting from state i.
See also: ctmcmtta.
Next: Queueing Networks, Previous: Markov Chains, Up: Top [Contents][Index]
Single Station Queueing Systems contain a single station, and can
usually be analyzed easily. The queueing package contains
functions for handling the following types of queues:
| • The M/M/1 System: | Single-server queueing station. | |
| • The M/M/m System: | Multiple-server queueing station. | |
| • The Erlang-B Formula: | ||
| • The Erlang-C Formula: | ||
| • The Engset Formula: | ||
| • The M/M/inf System: | Infinite-server (delay center) station. | |
| • The M/M/1/K System: | Single-server, finite-capacity queueing station. | |
| • The M/M/m/K System: | Multiple-server, finite-capacity queueing station. | |
| • The Asymmetric M/M/m System: | Asymmetric multiple-server queueing station. | |
| • The M/G/1 System: | Single-server with general service time distribution. | |
| • The M/Hm/1 System: | Single-server with hyperexponential service time distribution. |
Next: The M/M/m System, Up: Single Station Queueing Systems [Contents][Index]
The M/M/1 system contains a single server connected to an unbounded FCFS queue. Requests arrive according to a Poisson process with rate \lambda; the service time is exponentially distributed with average service rate \mu. The system is stable if \lambda < \mu.
Compute utilization, response time, average number of requests and throughput for a M/M/1 queue.
INPUTS
lambdaArrival rate (lambda ≥ 0).
muService rate (mu > lambda).
kNumber of requests in the system (k ≥ 0).
OUTPUTS
UServer utilization
RServer response time
QAverage number of requests in the system
XServer throughput. If the system is ergodic (mu >
lambda), we always have X = lambda
p0Steady-state probability that there are no requests in the system.
pkSteady-state probability that there are k requests in the system. (including the one being served).
If this function is called with less than three input parameters, lambda and mu can be vectors of the same size. In this case, the results will be vectors as well.
REFERENCES
See also: qsmmm, qsmminf, qsmmmk.
Next: The Erlang-B Formula, Previous: The M/M/1 System, Up: Single Station Queueing Systems [Contents][Index]
The M/M/m system is similar to the M/M/1 system, except that there are m \geq 1 identical servers connected to a shared FCFS queue. Thus, at most m requests can be served at the same time. The M/M/m system can be seen as a single server with load-dependent service rate \mu(n), which is a function of the number n of requests in the system:
mu(n) = min(m,n)*mu
where \mu is the service rate of each individual server.
Compute utilization, response time, average number of requests in service and throughput for a M/M/m queue, a queueing system with m identical servers connected to a single FCFS queue.
INPUTS
lambdaArrival rate (lambda>0).
muService rate (mu>lambda).
mNumber of servers (m ≥ 1).
Default is m=1.
kNumber of requests in the system (k ≥ 0).
OUTPUTS
UService center utilization, U = \lambda / (m \mu).
RService center mean response time
QAverage number of requests in the system
XService center throughput. If the system is ergodic,
we will always have X = lambda
p0Steady-state probability that there are 0 requests in the system
pmSteady-state probability that an arriving request has to wait in the queue
pkSteady-state probability that there are k requests in the system (including the one being served).
If this function is called with less than four parameters, lambda, mu and m can be vectors of the same size. In this case, the results will be vectors as well.
REFERENCES
See also: erlangc,qsmm1,qsmminf,qsmmmk.
Next: The Erlang-C Formula, Previous: The M/M/m System, Up: Single Station Queueing Systems [Contents][Index]
Compute the steady-state blocking probability in the Erlang loss model.
The Erlang-B formula E_B(A, m) gives the probability that an open system with m identical servers, arrival rate \lambda, individual service rate \mu and offered load A = \lambda / \mu has all servers busy. This corresponds to the rejection probability of an M/M/m/0 system with m servers and no queue.
INPUTS
AOffered load, defined as A = \lambda / \mu where \lambda is the mean arrival rate and \mu the mean service rate of each individual server (real, A > 0).
mNumber of identical servers (integer, m ≥ 1). Default m = 1
OUTPUTS
BThe value E_B(A, m)
A or m can be vectors, and in this case, the results will be vectors as well.
REFERENCES
See also: erlangc,engset,qsmmm.
Next: The Engset Formula, Previous: The Erlang-B Formula, Up: Single Station Queueing Systems [Contents][Index]
Compute the steady-state probability of delay in the Erlang delay model.
The Erlang-C formula E_C(A, m) gives the probability that an open queueing system with m identical servers, infinite wating space, arrival rate \lambda, individual service rate \mu and offered load A = \lambda / \mu has all the servers busy. This is the waiting probability in an M/M/m/\infty system with m servers and an infinite queue.
INPUTS
AOffered load. A = \lambda / \mu where \lambda is the mean arrival rate and \mu the mean service rate of each individual server (real, 0 < A < m).
mNumber of identical servers (integer, m ≥ 1). Default m = 1
OUTPUTS
BThe value E_C(A, m)
A or m can be vectors, and in this case, the results will be vectors as well.
REFERENCES
See also: erlangb,engset,qsmmm.
Next: The M/M/inf System, Previous: The Erlang-C Formula, Up: Single Station Queueing Systems [Contents][Index]
Evaluate the Engset loss formula.
The Engset formula computes the blocking probability P_b(A,m,n) for a system with a finite population of n users, m identical servers, no queue, individual service rate \mu, individual arrival rate \lambda (i.e., the time until a user tries to request service is exponentially distributed with mean 1/\lambda), and offered load A=\lambda/\mu.
INPUTS
AOffered load, defined as A = \lambda / \mu where \lambda is the mean arrival rate and \mu the mean service rate of each individual server (real, A > 0).
mNumber of identical servers (integer, m ≥ 1). Default m = 1
nNumber of requests (integer, n ≥ 1). Default n = 1
OUTPUTS
BThe value P_b(A, m, n)
A, m or n can be vectors, and in this case, the results will be vectors as well.
REFERENCES
See also: erlangb, erlangc.
Next: The M/M/1/K System, Previous: The Engset Formula, Up: Single Station Queueing Systems [Contents][Index]
The M/M/\infty system is a special case of M/M/m system with infinitely many identical servers (i.e., m = \infty). Each new request is always assigned to a new server, so that queueing never occurs. The M/M/\infty system is always stable.
Compute utilization, response time, average number of requests and throughput for an infinite-server queue.
The M/M/\infty system has an infinite number of identical servers. Such a system is always stable (i.e., the mean queue length is always finite) for any arrival and service rates.
INPUTS
lambdaArrival rate (lambda>0).
muService rate (mu>0).
kNumber of requests in the system (k ≥ 0).
OUTPUTS
UTraffic intensity (defined as \lambda/\mu). Note that this is different from the utilization, which in the case of M/M/\infty centers is always zero.
RService center response time.
QAverage number of requests in the system (which is equal to the traffic intensity \lambda/\mu).
XThroughput (which is always equal to X = lambda).
p0Steady-state probability that there are no requests in the system
pkSteady-state probability that there are k requests in the system (including the one being served).
If this function is called with less than three arguments, lambda and mu can be vectors of the same size. In this case, the results will be vectors as well.
REFERENCES
See also: qsmm1,qsmmm,qsmmmk.
Next: The M/M/m/K System, Previous: The M/M/inf System, Up: Single Station Queueing Systems [Contents][Index]
In a M/M/1/K finite capacity system there is a single server, and there can be at most K jobs at any time (including the job currently in service), K > 1. If a new request tries to join the system when there are already K other requests, the request is lost. The queue has K-1 slots. The M/M/1/K system is always stable, regardless of the arrival and service rates.
Compute utilization, response time, average number of requests and throughput for a M/M/1/K finite capacity system.
In a M/M/1/K queue there is a single server and a queue with finite capacity: the maximum number of requests in the system (including the request being served) is K, and the maximum queue length is therefore K-1.
INPUTS
lambdaArrival rate (lambda>0).
muService rate (mu>0).
KMaximum number of requests allowed in the system (K ≥ 1).
nNumber of requests in the (0 ≤ n ≤ K).
OUTPUTS
UService center utilization, which is defined as U = 1-p0
RService center response time
QAverage number of requests in the system
XService center throughput
p0Steady-state probability that there are no requests in the system
pKSteady-state probability that there are K requests in the system (i.e., that the system is full)
pnSteady-state probability that there are n requests in the system (including the one being served).
If this function is called with less than four arguments, lambda, mu and K can be vectors of the same size. In this case, the results will be vectors as well.
See also: qsmm1,qsmminf,qsmmm.
Next: The Asymmetric M/M/m System, Previous: The M/M/1/K System, Up: Single Station Queueing Systems [Contents][Index]
The M/M/m/K finite capacity system is similar to the M/M/1/k system except that the number of servers is m, where 1 \leq m \leq K. The queue has K-m slots. The M/M/m/K system is always stable.
Compute utilization, response time, average number of requests and throughput for a M/M/m/K finite capacity system. In a M/M/m/K system there are m \geq 1 identical service centers sharing a fixed-capacity queue. At any time, at most K ≥ m requests can be in the system, including those being served. The maximum queue length is K-m. This function generates and solves the underlying CTMC.
INPUTS
lambdaArrival rate (lambda>0)
muService rate (mu>0)
mNumber of servers (m ≥ 1)
KMaximum number of requests allowed in the system,
including those being served (K ≥ m)
nNumber of requests in the (0 ≤ n ≤ K).
OUTPUTS
UService center utilization
RService center response time
QAverage number of requests in the system
XService center throughput
p0Steady-state probability that there are no requests in the system.
pKSteady-state probability that there are K requests in the system (i.e., probability that the system is full).
pnSteady-state probability that there are n requests in the system (including those being served).
If this function is called with less than five arguments, lambda, mu, m and K can be either scalars, or vectors of the same size. In this case, the results will be vectors as well.
REFERENCES
See also: qsmm1,qsmminf,qsmmm.
Next: The M/G/1 System, Previous: The M/M/m/K System, Up: Single Station Queueing Systems [Contents][Index]
The Asymmetric M/M/m system contains m servers connected to a single queue. Differently from the M/M/m system, in the asymmetric M/M/m each server may have a different service time.
Compute approximate utilization, response time, average number of requests in service and throughput for an asymmetric M/M/m queue. In this type of system there are m different servers connected to a single queue. Each server has its own (possibly different) service rate. If there is more than one server available, requests are routed to a randomly-chosen one.
INPUTS
lambdaArrival rate (lambda>0)
mumu(i) is the service rate of server
i, 1 ≤ i ≤ m.
The system must be ergodic (lambda < sum(mu)).
OUTPUTS
UApproximate service center utilization, U = \lambda / ( \sum_{i=1}^m \mu_i ).
RApproximate service center response time
QApproximate number of requests in the system
XApproximate system throughput. If the system is ergodic,
X = lambda
REFERENCES
See also: qsmmm.
Next: The M/Hm/1 System, Previous: The Asymmetric M/M/m System, Up: Single Station Queueing Systems [Contents][Index]
Compute utilization, response time, average number of requests and throughput for a M/G/1 system. The service time distribution is described by its mean xavg, and by its second moment x2nd. The computations are based on results from L. Kleinrock, Queuing Systems, Wiley, Vol 2, and Pollaczek-Khinchine formula.
INPUTS
lambdaArrival rate
xavgAverage service time
x2ndSecond moment of service time distribution
OUTPUTS
UService center utilization
RService center response time
QAverage number of requests in the system
XService center throughput
p0Probability that there is not any request at system
lambda, xavg, t2nd can be vectors of the same size. In this case, the results will be vectors as well.
See also: qsmh1.
Previous: The M/G/1 System, Up: Single Station Queueing Systems [Contents][Index]
Compute utilization, response time, average number of requests and throughput for a M/H_m/1 system. In this system, the customer service times have hyper-exponential distribution:
___ m
\
B(x) = > alpha(j) * (1-exp(-mu(j)*x)) x>0
/__
j=1
where \alpha_j is the probability that the request is served at phase j, in which case the average service rate is \mu_j. After completing service at phase j, for some j, the request exits the system.
INPUTS
lambdaArrival rate
mumu(j) is the phase j service rate. The total
number of phases m is length(mu).
alphaalpha(j) is the probability that a request
is served at phase j. alpha must have the same size
as mu.
OUTPUTS
UService center utilization
RService center response time
QAverage number of requests in the system
XService center throughput
Next: References, Previous: Single Station Queueing Systems, Up: Top [Contents][Index]
| • Introduction to QNs: | A brief introduction to Queueing Networks | |
| • Single Class Models: | Queueing models with a single job class | |
| • Multiple Class Models: | Queueing models with multiple job classes | |
| • Generic Algorithms: | High-level functions for QN analysis | |
| • Bounds Analysis: | Computation of asymptotic performance bounds | |
| • QN Analysis Examples: | Queueing Networks analysis examples |
Next: Single Class Models, Up: Queueing Networks [Contents][Index]
Queueing Networks (QN) are a simple modeling notation that can be used to analyze many kinds of systems. In its simplest form, a QN is made of K service centers; center k has a queue connected to m_k (usually identical) servers. Arriving customers (requests) join the queue if there is at least one slot available. Requests are served according to a (de)queueing policy (e.g., FIFO). After service completes, requests leave the server and can join another queue or exit from the system.
Service centers where m_k = \infty are called delay centers or infinite servers. In this kind of centers, there is always one available server, so that queueing never occurs.
Requests join the queue according to a queueing policy, such as:
First-Come-First-Served
Last-Come-First-Served, Preemptive Resume
Processor Sharing
Infinite Server (m_k = \infty).
Queueing networks can be open or closed. In open networks there is an infinite population of requests; new customers are generated outside the system, and eventually leave the network. In closed networks there is a fixed population of request that never leave the system.
Queueing models can have a single request class (single class models), meaning that all requests behave in the same way (e.g., they spend the same average time on each particular server). In multiple class models there are multiple request classes, each with its own parameters (e.g., with different service times or different routing probabilities). Furthermore, in multiclass models there can be open and closed chains of requests at the same time.
A particular class of QN models, product-form networks, is of particular interest. Product-form networks fulfill the following assumptions:
Product-form networks are attractive because steady-state performance measures can be efficiently computed.
Next: Multiple Class Models, Previous: Introduction to QNs, Up: Queueing Networks [Contents][Index]
In single class models, all requests are indistinguishable and belong to the same class. This means that every request has the same average service time, and all requests move through the system with the same routing probabilities.
Model Inputs
(Open models only) External arrival rate to service center k.
(Open models only) Overall external arrival rate to the system as a whole: \lambda = \sum_k \lambda_k.
(Closed models only) Total number of requests in the system.
Mean service time at center k. S_k is the average time elapsed from service start to service completion at center k.
Routing probability matrix. {\bf P} = [P_{i, j}] is a K \times K matrix where P_{i, j} is the probability that a request completing service at center i is routed to center j. The probability that a request leaves the system after being served at center i is \left(1-\sum_{j=1}^K P_{i, j}\right).
Mean number of visits to center k (also called visit ratio or relative arrival rate).
Model Outputs
Utilization of service center k. The utilization is defined as the fraction of time in which the resource is busy (i.e., the server is processing requests). If center k is a single-server or multiserver node, then 0 ≤ U_k ≤ 1. If center k is an infinite server node (delay center), then U_k denotes the traffic intensity and is defined as U_k = X_k S_k; in this case the utilization may be greater than one.
Average response time of service center k, defined as the mean time between the arrival of a request in the queue and service completion of the same request.
Average number of requests in center k; this includes both the requests in the queue and those being served.
Throughput of service center k. The throughput is the rate of job completions, i.e., the average number of jobs completed over a given time interval.
Given the output parameters above, additional performance measures can be computed:
System throughput, X = X_k / V_k for any k for which V_k \neq 0
System response time, R = \sum_{k=1}^K R_k V_k
Average number of requests in the system, Q = \sum_{k=1}^K Q_k; for closed systems, this can be written as Q = N-XZ;
For open, single class models, the scalar \lambda denotes the external arrival rate of requests to the system. The average number of visits V_j satisfy the following equation:
K
___
\
V_j = P_(0, j) + > V_i P_(i, j) j=1,...,K
/___
i=1
where P_{0, j} is the probability that an external request goes to center j. If we denote with \lambda_j the external arrival rate to center j, and \lambda = \sum_j \lambda_j the overall external arrival rate, then P_{0, j} = \lambda_j / \lambda.
For closed models, the visit ratios satisfy the following equation:
/ | K | ___ | \ | V_j = > V_i P_(i, j) j=1,...,K | /___ | i=1 | | V_r = 1 for a selected reference station r \
Note that the set of traffic equations V_j = \sum_{i=1}^K V_i P_{i, j} alone can only be solved up to a multiplicative constant; to get a unique solution we impose an additional constraint V_r = 1 for some 1 ≤ r ≤ K. This constraint is equivalent to defining station r as the reference station; the default is r=1, see doc-qncsvisits. A job that returns to the reference station is assumed to have completed its activity cycle. The network throughput is set to the throughput of the reference station.
Compute the mean number of visits to the service centers of a single class, closed network with K service centers.
INPUTS
P(i,j)probability that a request which completed service at center
i is routed to center j (K \times K matrix).
For closed networks it must hold that sum(P,2)==1. The
routing graph must be strongly connected, meaning that each node
must be reachable from every other node.
rIndex of the reference station, r \in {1, …, K};
Default r=1. The traffic equations are solved by
imposing the condition V(r) = 1. A request returning to
the reference station completes its activity cycle.
OUTPUTS
V(k)average number of visits to service center k, assuming r as the reference station.
Compute the average number of visits to the service centers of a single class open Queueing Network with K service centers.
INPUTS
P(i,j)is the probability that a request which completed service at center i is routed to center j (K \times K matrix).
lambda(k)external arrival rate to center k.
OUTPUTS
V(k)average number of visits to server k.
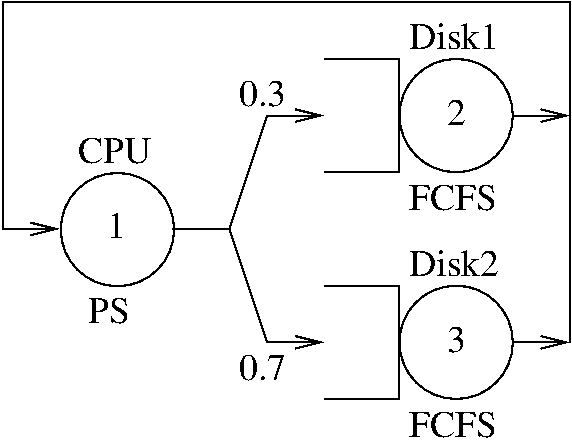
EXAMPLE
Figure 5.1 shows a closed queueing network with a single class of requests. The network has three service centers, labeled CPU, Disk1 and Disk2, and is known as a central server model of a computer system. Requests spend some time at the CPU, which is represented by a PS (Processor Sharing) node. After that, requests are routed to Disk1 with probability 0.3, and to Disk2 with probability 0.7. Both Disk1 and Disk2 are FCFS nodes.
If we label the servers as CPU=1, Disk1=2, Disk2=3, we can define the routing matrix as follows:
/ 0 0.3 0.7 \
P = | 1 0 0 |
\ 1 0 0 /
The visit ratios V, using station 1 as the reference station, can be computed with:
P = [0 0.3 0.7; ...
1 0 0 ; ...
1 0 0 ];
V = qncsvisits(P)
⇒ V = 1.00000 0.30000 0.70000
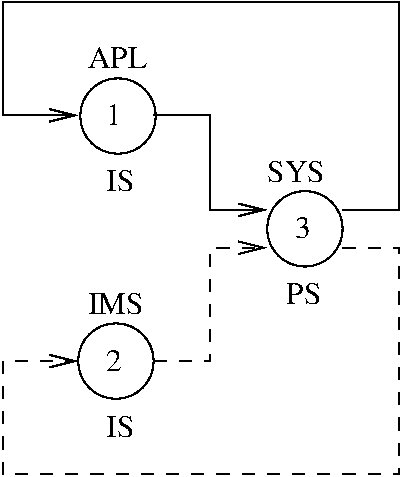
EXAMPLE
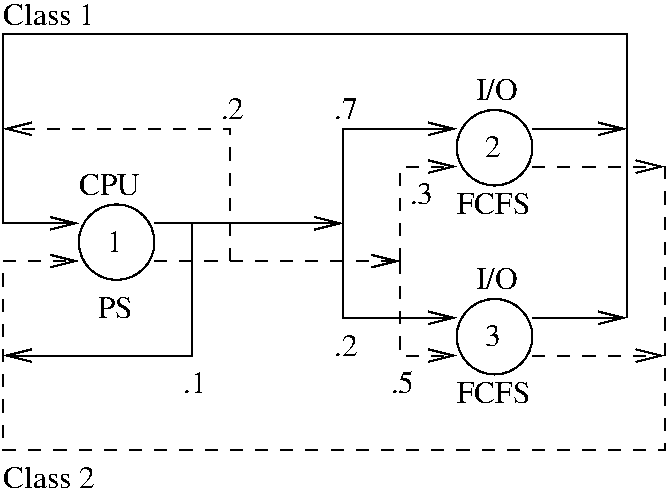
Figure 5.2 shows a open QN with a single class of requests. The network has the same structure as the one in Figure 5.1, with the difference that here we have a stream of jobs arriving from outside the system, at a rate \lambda. After service completion at the CPU, a job can leave the system with probability 0.2, or be transferred to other nodes with the probabilities shown in the figure.
The routing matrix is
/ 0 0.3 0.5 \
P = | 1 0 0 |
\ 1 0 0 /
If we let \lambda = 1.2, we can compute the visit ratios V as follows:
p = 0.3;
lambda = 1.2
P = [0 0.3 0.5; ...
1 0 0 ; ...
1 0 0 ];
V = qnosvisits(P,[1.2 0 0])
⇒ V = 5.0000 1.5000 2.5000
Function qnosvisits expects a vector with K elements
as a second parameter, for open networks only. The vector contains the
arrival rates at each individual node; since in our example external
arrivals exist only for node S_1 with rate \lambda =
1.2, the second parameter is [1.2, 0, 0].
Jackson networks satisfy the following conditions:
We define the joint probability vector \pi(n_1, …, n_K) as the steady-state probability that there are n_k requests at service center k, for all k=1, …, N. Jackson networks have the property that the joint probability is the product of the marginal probabilities \pi_k:
joint_prob = prod( pi )
where \pi_k(n_k) is the steady-state probability that there are n_k requests at service center k.
Analyze open, single class BCMP queueing networks with K service centers.
This function works for a subset of BCMP single-class open networks satisfying the following properties:
m(k) ≥ 1
identical servers.
INPUTS
lambdaOverall external arrival rate (lambda>0).
S(k)average service time at center k (S(k)>0).
V(k)average number of visits to center k (V(k) ≥ 0).
m(k)number of servers at center i. If m(k) < 1,
enter k is a delay center (IS); otherwise it is a regular
queueing center with m(k) servers. Default is
m(k) = 1 for all k.
OUTPUTS
U(k)If k is a queueing center,
U(k) is the utilization of center k.
If k is an IS node, then U(k) is the
traffic intensity defined as X(k)*S(k).
R(k)center k average response time.
Q(k)average number of requests at center k.
X(k)center k throughput.
REFERENCES
See also: qnopen,qnclosed,qnosvisits.
From the results computed by this function, it is possible to derive other quantities of interest as follows:
R_s = dot(V,R);
Q_avg = sum(Q)
EXAMPLE
lambda = 3; V = [16 7 8]; S = [0.01 0.02 0.03]; [U R Q X] = qnos( lambda, S, V ); R_s = dot(R,V) # System response time N = sum(Q) # Average number in system
-| R_s = 1.4062 -| N = 4.2186
Analyze closed, single class queueing networks using the exact Mean Value Analysis (MVA) algorithm.
The following queueing disciplines are supported: FCFS, LCFS-PR, PS
and IS (Infinite Server). This function supports fixed-rate service
centers or multiple server nodes. For general load-dependent service
centers, use the function qncsmvald instead.
Additionally, the normalization constant G(n), n=0, …, N is computed; G(n) can be used in conjunction with the BCMP theorem to compute steady-state probabilities.
INPUTS
NPopulation size (number of requests in the system, N ≥ 0).
If N == 0, this function returns
U = R = Q = X = 0
S(k)mean service time at center k (S(k) ≥ 0).
V(k)average number of visits to service center k (V(k) ≥ 0).
ZExternal delay for customers (Z ≥ 0). Default is 0.
m(k)number of servers at center k (if m is a scalar, all
centers have that number of servers). If m(k) < 1,
center k is a delay center (IS); otherwise it is a regular
queueing center (FCFS, LCFS-PR or PS) with m(k)
servers. Default is m(k) = 1 for all k (each
service center has a single server).
OUTPUTS
U(k)If k is a FCFS, LCFS-PR or PS node (m(k) ≥
1), then U(k) is the utilization of center k,
0 ≤ U(k) ≤ 1. If k is an IS node
(m(k) < 1), then U(k) is the traffic
intensity defined as X(k)*S(k). In this case the
value of U(k) may be greater than one.
R(k)center k response time. The Residence Time at center
k is R(k) * V(k). The system response
time Rsys can be computed either as Rsys =
N/Xsys - Z or as Rsys =
dot(R,V)
Q(k)average number of requests at center k. The number of
requests in the system can be computed either as
sum(Q), or using the formula
N-Xsys*Z.
X(k)center K throughput. The system throughput Xsys can be
computed as Xsys = X(1) / V(1)
G(n)Normalization constants. G(n+1) contains the value of
the normalization constant G(n), n=0, …, N as
array indexes in Octave start from 1. G(n) can be used in
conjunction with the BCMP theorem to compute steady-state
probabilities.
NOTES
In presence of load-dependent servers (i.e., if m(k)>1
for some k), the MVA algorithm is known to be numerically
unstable. Generally, this issue manifests itself as negative values
for the response times or utilizations. This is not a problem of
the queueing toolbox, but of the MVA algorithm, and has
currently no known solution. This function prints a warning if
numerical problems are detected; the warning can be disabled with
the command warning("off", "qn:numerical-instability").
REFERENCES
This implementation is described in R. Jain , The Art of Computer Systems Performance Analysis, Wiley, 1991, p. 577. Multi-server nodes are treated according to G. Bolch, S. Greiner, H. de Meer and K. Trivedi, Queueing Networks and Markov Chains: Modeling and Performance Evaluation with Computer Science Applications, Wiley, 1998, Section 8.2.1, "Single Class Queueing Networks".
See also: qncsmvald,qncscmva.
EXAMPLE
S = [ 0.125 0.3 0.2 ];
V = [ 16 10 5 ];
N = 20;
m = ones(1,3);
Z = 4;
[U R Q X] = qncsmva(N,S,V,m,Z);
X_s = X(1)/V(1); # System throughput
R_s = dot(R,V); # System response time
printf("\t Util Qlen RespT Tput\n");
printf("\t-------- -------- -------- --------\n");
for k=1:length(S)
printf("Dev%d\t%8.4f %8.4f %8.4f %8.4f\n", k, U(k), Q(k), R(k), X(k) );
endfor
printf("\nSystem\t %8.4f %8.4f %8.4f\n\n", N-X_s*Z, R_s, X_s );
Mean Value Analysis algorithm for closed, single class queueing
networks with K service centers and load-dependent service
times. This function supports FCFS, LCFS-PR, PS and IS nodes. For
networks with only fixed-rate centers and multiple-server
nodes, the function qncsmva is more efficient.
INPUTS
NPopulation size (number of requests in the system, N ≥ 0).
If N == 0, this function returns U = R = Q = X = 0
S(k,n)mean service time at center k
where there are n requests, 1 ≤ n
≤ N. S(k,n) = 1 / \mu_{k}(n),
where \mu_{k}(n) is the service rate of center k
when there are n requests.
V(k)average number of visits to service center k (V(k) ≥ 0).
Zexternal delay ("think time", Z ≥ 0); default 0.
OUTPUTS
U(k)utilization of service center k. The utilization is defined as the probability that service center k is not empty, that is, U_k = 1-\pi_k(0) where \pi_k(0) is the steady-state probability that there are 0 jobs at service center k.
R(k)response time on service center k.
Q(k)average number of requests in service center k.
X(k)throughput of service center k.
NOTES
In presence of load-dependent servers, the MVA algorithm is known to be numerically unstable. Generally this problem manifests itself as negative response times or utilization.
REFERENCES
This implementation is described in G. Bolch, S. Greiner, H. de Meer and K. Trivedi, Queueing Networks and Markov Chains: Modeling and Performance Evaluation with Computer Science Applications, Wiley, 1998, Section 8.2.4.1, “Networks with Load-Dependent Service: Closed Networks”.
See also: qncsmva.
Conditional MVA (CMVA) algorithm, a numerically stable variant of MVA. This function supports a network of M ≥ 1 service centers and a single delay center. Servers 1, …, (M-1) are load-independent; server M is load-dependent.
INPUTS
NNumber of requests in the system, N ≥ 0. If
N == 0, this function returns U = R
= Q = X = 0
S(k)mean service time on server k = 1, …, (M-1)
(S(k) > 0). If there are no fixed-rate servers, then
S = []
Sld(n)inverse service rate at server M (the load-dependent server)
when there are n requests, n=1, …, N.
Sld(n) = 1 / \mu(n).
V(k)average number of visits to service center k=1, …, M,
where V(k) ≥ 0. V(1:M-1) are the
visit rates to the fixed rate servers; V(M) is the
visit rate to the load dependent server.
ZExternal delay for customers (Z ≥ 0). Default is 0.
OUTPUTS
U(k)center k utilization (k=1, …, M)
R(k)response time of center k (k=1, …, M). The
system response time Rsys can be computed as Rsys
= N/Xsys - Z
Q(k)average number of requests at center k (k=1, …, M).
X(k)center k throughput (k=1, …, M).
REFERENCES
Analyze closed, single class queueing networks using the Approximate
Mean Value Analysis (MVA) algorithm. This function is based on
approximating the number of customers seen at center k when a
new request arrives as Q_k(N) \times (N-1)/N. This function
only handles single-server and delay centers; if your network
contains general load-dependent service centers, use the function
qncsmvald instead.
INPUTS
NPopulation size (number of requests in the system, N > 0).
S(k)mean service time on server k
(S(k)>0).
V(k)average number of visits to service center
k (V(k) ≥ 0).
m(k)number of servers at center k
(if m is a scalar, all centers have that number of servers). If
m(k) < 1, center k is a delay center (IS); if
m(k) == 1, center k is a regular queueing
center (FCFS, LCFS-PR or PS) with one server (default). This function
does not support multiple server nodes (m(k) > 1).
ZExternal delay for customers (Z ≥ 0). Default is 0.
tolStopping tolerance. The algorithm stops when the maximum relative difference between the new and old value of the queue lengths Q becomes less than the tolerance. Default is 10^{-5}.
iter_maxMaximum number of iterations (iter_max>0.
The function aborts if convergenge is not reached within the maximum
number of iterations. Default is 100.
OUTPUTS
U(k)If k is a FCFS, LCFS-PR or PS node (m(k) == 1),
then U(k) is the utilization of center k. If
k is an IS node (m(k) < 1), then
U(k) is the traffic intensity defined as
X(k)*S(k).
R(k)response time at center k.
The system response time Rsys
can be computed as Rsys = N/Xsys - Z
Q(k)average number of requests at center k. The number of
requests in the system can be computed either as
sum(Q), or using the formula
N-Xsys*Z.
X(k)center k throughput. The system throughput Xsys can be
computed as Xsys = X(1) / V(1)
REFERENCES
This implementation is based on Edward D. Lazowska, John Zahorjan, G. Scott Graham, and Kenneth C. Sevcik, Quantitative System Performance: Computer System Analysis Using Queueing Network Models, Prentice Hall, 1984. http://www.cs.washington.edu/homes/lazowska/qsp/. In particular, see section 6.4.2.2 ("Approximate Solution Techniques").
See also: qncsmva,qncsmvald.
According to the BCMP theorem, the state probability of a closed single class queueing network with K nodes and N requests can be expressed as:
n = [n1, … nK]; population vector
p = 1/G(N+1) \prod F(k,k);
Here \pi(n_1, …, n_K) is the joint probability of having n_k requests at node k, for all k=1, …, K; we have that \sum_{k=1}^K n_k = N
The convolution algorithms computes the normalization constants
{\bf G} = \left[G(0), …, G(N)\right] for single-class,
closed networks with N requests. The normalization constants
are returned as vector G=[G(1), …
G(N+1)] where G(i+1) is the value of G(i)
(remember that Octave uses 1-base vectors). The normalization constant
can be used to compute all performance measures of interest
(utilization, average response time and so on).
queueing implements the convolution algorithm, in the function
qncsconv and qncsconvld. The first one
supports single-station nodes, multiple-station nodes and IS nodes.
The second one supports networks with general load-dependent service
centers.
Analyze product-form, single class closed networks with K service centers using the convolution algorithm.
Load-independent service centers, multiple servers (M/M/m
queues) and IS nodes are supported. For general load-dependent
service centers, use qncsconvld instead.
INPUTS
NNumber of requests in the system (N>0).
S(k)average service time on center k (S(k) ≥ 0).
V(k)visit count of service center k (V(k) ≥ 0).
m(k)number of servers at center k. If m(k) < 1,
center k is a delay center (IS); if m(k) ≥
1, center k it is a regular M/M/m queueing center
with m(k) identical servers. Default is
m(k) = 1 for all k.
OUTPUT
U(k)center k utilization.
For IS nodes, U(k) is the traffic intensity
X(k) * S(k).
R(k)average response time of center k.
Q(k)average number of customers at center k.
X(k)throughput of center k.
G(n)Vector of normalization constants. G(n+1) contains the value of
the normalization constant with n requests
G(n), n=0, …, N.
NOTE
For a network with K service centers and N requests, this implementation of the convolution algorithm has time and space complexity O(NK).
REFERENCES
This implementation is based on G. Bolch, S. Greiner, H. de Meer and K. Trivedi, Queueing Networks and Markov Chains: Modeling and Performance Evaluation with Computer Science Applications, Wiley, 1998, pp. 313–317.
See also: qncsconvld.
EXAMPLE
The normalization constant G can be used to compute the
steady-state probabilities for a closed single class product-form
Queueing Network with K nodes and N requests. Let
n = [n_1, …, n_K] be a valid
population vector, \sum_{k=1}^K n_k = N. Then, the steady-state
probability p(k) to have n(k) requests at
service center k can be computed as:
n = [1 2 0];
N = sum(n); # Total population size
S = [ 1/0.8 1/0.6 1/0.4 ];
m = [ 2 3 1 ];
V = [ 1 .667 .2 ];
[U R Q X G] = qncsconv( N, S, V, m );
p = [0 0 0]; # initialize p
# Compute the probability to have n(k) jobs at service center k
for k=1:3
p(k) = (V(k)*S(k))^n(k) / G(N+1) * ...
(G(N-n(k)+1) - V(k)*S(k)*G(N-n(k)) );
printf("Prob( n(%d) = %d )=%f\n", k, n(k), p(k) );
endfor
-| Prob( n(1) = 1 ) = 0.17975 -| Prob( n(2) = 2 ) = 0.48404 -| Prob( n(3) = 0 ) = 0.52779
(recall that G(N+1) represents G(N), since
in Octave array indices start at one).
Convolution algorithm for product-form, single-class closed queueing networks with K general load-dependent service centers.
This function computes steady-state performance measures for
single-class, closed networks with load-dependent service centers
using the convolution algorithm; the normalization constants are also
computed. The normalization constants are returned as vector
G=[G(1), …, G(N+1)] where
G(i+1) is the value of G(i).
INPUTS
NNumber of requests in the system (N>0).
S(k,n)mean service time at center k where there are n
requests, 1 ≤ n ≤ N. S(k,n) = 1 / \mu_{k,n}, where \mu_{k,n} is the service rate of center
k when there are n requests.
V(k)visit count of service center k
(V(k) ≥ 0). The length of V is the number of
servers K in the network.
OUTPUT
U(k)center k utilization.
R(k)average response time at center k.
Q(k)average number of requests in center k.
X(k)center k throughput.
G(n)Normalization constants (vector). G(n+1)
corresponds to G(n), as array indexes in Octave start
from 1.
REFERENCES
This implementation is based on G. Bolch, S. Greiner, H. de Meer and
K. Trivedi, Queueing Networks and Markov Chains: Modeling and
Performance Evaluation with Computer Science Applications, Wiley,
1998, pp. 313–317. Function qncsconvld is slightly
different from the version described in Bolch et al. because it
supports general load-dependent centers (while the version in the book
does not). The modification is in the definition of function
F() in qncsconvld which has been made similar to
function f_i defined in Schwetman, Some Computational
Aspects of Queueing Network Models.
See also: qncsconv.
Approximate MVA algorithm for closed queueing networks with blocking.
INPUTS
Nnumber of requests in the system. N must be strictly greater
than zero, and less than the overall network capacity: 0 <
N < sum(M).
S(k)average service time on server k (S(k) > 0).
M(k)capacity of center k. The capacity is the maximum number of requests in a service
center, including the request in service (M(k) ≥ 1).
P(i,j)probability that a request which completes service at server i will be transferred to server j.
OUTPUTS
U(k)center k utilization.
R(k)average response time of service center k.
Q(k)average number of requests in service center k (including the request in service).
X(k)center k throughput.
REFERENCES
See also: qnopen, qnclosed.
Compute utilization, response time, average queue length and throughput for open or closed queueing networks with finite capacity and a single class of requests. Blocking type is Repetitive-Service (RS). This function explicitly generates and solve the underlying Markov chain, and thus might require a large amount of memory.
More specifically, networks which can me analyzed by this function have the following properties:
INPUTS
lambda(k)NIf the first argument is a vector lambda, it is considered to be
the external arrival rate lambda(k) ≥ 0 to service center
k of an open network. If the first argument is a scalar, it is
considered as the population size N of a closed network; in this case
N must be strictly
less than the network capacity: N < sum(C).
S(k)average service time at service center k
C(k)capacity of service center k. The capacity includes both
the buffer and server space m(k). Thus the buffer space is
C(k)-m(k).
P(i,j)transition probability from service center i to service center j.
m(k)number of servers at service center
k. Note that m(k) ≥ C(k) for each k.
If m is omitted, all service centers are assumed to have a
single server (m(k) = 1 for all k).
OUTPUTS
U(k)center k utilization.
R(k)response time on service center k.
Q(k)average number of customers in the service center k, including the request in service.
X(k)throughput of service center k.
NOTES
The space complexity of this implementation is O(\prod_{k=1}^K (C_k + 1)^2). The time complexity is dominated by the time needed to solve a linear system with \prod_{k=1}^K (C_k + 1) unknowns.
Next: Generic Algorithms, Previous: Single Class Models, Up: Queueing Networks [Contents][Index]
In multiple class queueing models, we assume that there exist C different classes of requests. Each request from class c spends on average time S_{c, k} in service at center k. For open models, we denote with {\bf \lambda} = \lambda_{c, k} the arrival rates, where \lambda_{c, k} is the external arrival rate of class c requests at center k. For closed models, we denote with {\bf N} = \left[N_1, …, N_C\right] the population vector, where N_c is the number of class c requests in the system.
The transition probability matrix for multiple class networks is a C \times K \times C \times K matrix {\bf P} = [P_{r, i, s, j}] where P_{r, i, s, j} is the probability that a class r request which completes service at center i will join server j as a class s request.
Model input and outputs can be adjusted by adding additional indexes for the customer classes.
Model Inputs
(open networks) External arrival rate of class-c requests to service center k
(open networks) Overall external arrival rate to the whole system: \lambda = \sum_{c=1}^C \sum_{k=1}^K \lambda_{c, k}
(closed networks) Number of class c requests in the system.
Average service time. S_{c, k} is the average service time on service center k for class c requests.
Routing probability matrix. {\bf P} = [P_{r, i, s, j}] is a C \times K \times C \times K matrix such that P_{r, i, s, j} is the probability that a class r request which completes service at server i will move to server j as a class s request.
Mean number of visits of class c requests to center k.
Model Outputs
Utilization of service center k by class c requests. The utilization is defined as the fraction of time in which the resource is busy (i.e., the server is processing requests). If center k is a single-server or multiserver node, then 0 ≤ U_{c, k} ≤ 1. If center k is an infinite server node (delay center), then U_{c, k} denotes the traffic intensity and is defined as U_{c, k} = X_{c, k} S_{c, k}; in this case the utilization may be greater than one.
Average response time experienced by class c requests on service center k. The average response time is defined as the average time between the arrival of a customer in the queue, and the completion of service.
Average number of class c requests on service center k. This includes both the requests in the queue, and the request being served.
Throughput of service center k for class c requests. The throughput is defined as the rate of completion of class c requests.
It is possible to define aggregate performance measures as follows:
Utilization of service center k:
Uk = sum(U,k);
System response time for class c requests:
Rc = sum( V.*R, 1 );
Average number of class c requests in the system:
Qc = sum( Q, 2 );
Class c throughput:
X(c) = X(c,k) ./ V(c,k); for any k for which V(c,k) != 0
For closed networks, we can define the visit ratios V_{s, j} for class s customers at service center j as follows:
V_sj = sum_r sum_i V_ri P_risj s=1,...,C, j=1,...,K V_s r_s = 1 s=1,...,C
where r_s is the class s reference station. Similarly to single class models, the traffic equation for closed multiclass networks can be solved up to multiplicative constants unless we choose one reference station for each closed class and set its visit ratio to 1.
For open networks the traffic equations are as follows:
V_sj = P_0sj + sum_r sum_i V_ri P_risj s=1,...,C, j=1,...,K
where P_{0, s, j} is the probability that an external arrival goes to service center j as a class-s request. If \lambda_{s, j} is the external arrival rate of class s requests to service center j, and \lambda = \sum_s \sum_j \lambda_{s, j} is the overall external arrival rate, then P_{0, s, j} = \lambda_{s, j} / \lambda.
Compute the average number of visits for the nodes of a closed multiclass network with K service centers and C customer classes.
INPUTS
P(r,i,s,j)probability that a class r request which completed service at center i is routed to center j as a class s request. Class switching is allowed.
r(c)index of class c reference station,
r(c) \in {1, …, K}, 1 ≤ c ≤ C.
The class c visit count to server r(c)
(V(c,r(c))) is conventionally set to 1. The reference
station serves two purposes: (i) its throughput is assumed to be the
system throughput, and (ii) a job returning to the reference station
is assumed to have completed one cycle. Default is to consider
station 1 as the reference station for all classes.
OUTPUTS
V(c,i)number of visits of class c requests at center i.
ch(c)chain number that class c belongs
to. Different classes can belong to the same chain. Chains are
numbered sequentially starting from 1 (1, 2, …). The
total number of chains is max(ch).
Compute the visit ratios to the service centers of an open multiclass network with K service centers and C customer classes.
INPUTS
P(r,i,s,j)probability that a class r request which completed service at center i is routed to center j as a class s request. Class switching is supported.
lambda(r,i)external arrival rate of class r requests to center i.
OUTPUTS
V(r,i)visit ratio of class r requests at center i.
Exact analysis of open, multiple-class BCMP networks. The network can be made of single-server queueing centers (FCFS, LCFS-PR or PS) or delay centers (IS). This function assumes a network with K service centers and C customer classes.
INPUTS
lambda(c)If this function is invoked as qnom(lambda, S, V, …),
then lambda(c) is the external arrival rate of class
c customers (lambda(c) ≥ 0). If this
function is invoked as qnom(lambda, S, P, …), then
lambda(c,k) is the external arrival rate of class
c customers at center k (lambda(c,k)
≥ 0).
S(c,k)mean service time of class c customers on the service center
k (S(c,k)>0). For FCFS nodes, mean service
times must be class-independent.
V(c,k)visit ratio of class c customers to service center k
(V(c,k) ≥ 0 ). If you pass this argument,
class switching is not allowed
P(r,i,s,j)probability that a class r job completing service at center
i is routed to center j as a class s job.
If you pass argument P, class switching is allowed;
however, all servers must be fixed-rate or infinite-server nodes
(m(k) ≤ 1 for all k).
m(k)number of servers at center k. If m(k) < 1,
enter k is a delay center (IS); otherwise it is a regular
queueing center with m(k) servers. Default is
m(k) = 1 for all k.
OUTPUTS
U(c,k)If k is a queueing center, then U(c,k) is the
class c utilization of center k. If k is an IS
node, then U(c,k) is the class c traffic
intensity defined as X(c,k)*S(c,k).
R(c,k)class c response time at center k. The system
response time for class c requests can be computed as
dot(R, V, 2).
Q(c,k)average number of class c requests at center k. The
average number of class c requests in the system Qc
can be computed as Qc = sum(Q, 2)
X(c,k)class c throughput at center k.
NOTES
If the function call specifies the visit ratios V, class switching is not allowed. If the function call specifies the routing probability matrix P, then class switching is allowed; however, all nodes are restricted to be fixed rate servers or delay centers: multiple-server and general load-dependent centers are not supported. Note that the meaning of parameter lambda is different from one case to the other (see below).
REFERENCES
See also: qnopen,qnos,qnomvisits.
Return the set of population mixes for a closed multiclass queueing
network with exactly k customers. Specifically, given a
closed multiclass QN with C customer classes, where there
are N(c) class c requests, c = 1, …, C
a k-mix M is a vector of length C with the following
properties:
In other words, a k-mix is an allocation of k
requests to C classes such that the number of requests
assigned to class c does not exceed the maximum value
N(c).
pop_mix is a matrix with C columns, such that each row represents a valid mix.
INPUTS
kSize of the requested mix (scalar, k ≥ 0).
N(c)number of class c requests (k ≤ sum(N)).
OUTPUTS
pop_mix(i,c)number of class c requests in the i-th population
mix. The number of mixes is rows(pop_mix).
If you are interested in the number of k-mixes only, you can
use the funcion qnmvapop.
REFERENCES
The slightly different problem of enumerating all tuples k_1, …, k_N such that \sum_i k_i = k and k_i ≥ 0, for a given k ≥ 0 has been described in S. Santini, Computing the Indices for a Complex Summation, unpublished report, available at http://arantxa.ii.uam.es/~ssantini/writing/notes/s668_summation.pdf
See also: qncmnpop.
EXAMPLE
Let us consider a multiclass network with C=2 customer classes; the maximum number of class 1 requests is 2, and the maximum number of class 2 requests is 3. How is it possible to allocate 3 requests to the two classes so that the maximum number of requests per class is not exceeded?
N = [2 3]; mix = qncmpopmix(3, N)
-| mix = [ [2 1] [1 2] [0 3] ]
Given a network with C customer classes, this function
computes the number of k-mixes H(r,k) that can
be constructed by the multiclass MVA algorithm by allocating
k customers to the first r classes.
See doc-qncmpopmix for the definition of k-mix.
INPUTS
N(c)number of class-c requests in the system. The total number
of requests in the network is sum(N).
OUTPUTS
H(r,k)is the number of k mixes that can be constructed allocating k customers to the first r classes.
REFERENCES
See also: qncmmva,qncmpopmix.
Compute steady-state performance measures for closed, multiclass queueing networks using the Mean Value Analysys (MVA) algorithm.
Queueing policies at service centers can be any of the following:
(First-Come-First-Served) customers are served in order of arrival; multiple servers are allowed. For this kind of queueing discipline, average service times must be class-independent.
(Processor Sharing) customers are served in parallel by a single server, each customer receiving an equal share of the service rate.
(Last-Come-First-Served, Preemptive Resume) customers are served in reverse order of arrival by a single server and the last arrival preempts the customer in service who will later resume service at the point of interruption.
(Infinite Server) customers are delayed independently of other customers at the service center (there is effectively an infinite number of servers).
INPUTS
N(c)number of class c requests; N(c) ≥ 0. If
class c has no requests (N(c) == 0), then for
all k, this function returns
U(c,k) = R(c,k) = Q(c,k) = X(c,k) = 0
S(c,k)mean service time for class c requests at center k
(S(c,k) ≥ 0). If the service time at center
k is class-dependent, then center k is assumed
to be of type -/G/1–PS (Processor Sharing). If center
k is a FCFS node (m(k)>1), then the service
times must be class-independent, i.e., all classes
must have the same service time.
V(c,k)average number of visits of class c requests at
center k; V(c,k) ≥ 0, default is 1.
If you pass this argument, class switching is not allowed
P(r,i,s,j)probability that a class r request completing service at center
i is routed to center j as a class s request; the
reference stations for each class are specified with the paramter
r. If you pass argument P, class switching is
allowed; however, you can not specify any external delay (i.e.,
Z must be zero) and all servers must be fixed-rate or
infinite-server nodes (m(k) ≤ 1 for all
k).
r(c)reference station for class c. If omitted, station 1 is the
reference station for all classes. See qncmvisits.
m(k)If m(k)<1, then center k is assumed to be a delay
center (IS node -/G/\infty). If m(k)==1, then
service center k is a regular queueing center
(M/M/1–FCFS, -/G/1–LCFS-PR or -/G/1–PS).
Finally, if m(k)>1, center k is a
M/M/m–FCFS center with m(k) identical servers.
Default is m(k)=1 for each k.
Z(c)class c external delay (think time); Z(c) ≥
0. Default is 0. This parameter can not be used if you pass a
routing matrix as the second parameter of qncmmva.
OUTPUTS
U(c,k)If k is a FCFS, LCFS-PR or PS node (m(k) ≥
1), then U(c,k) is the class c utilization at
center k, 0 ≤ U(c,k) ≤ 1. If k is an
IS node, then U(c,k) is the class c traffic
intensity at center k, defined as U(c,k) =
X(c,k)*S(c,k). In this case the value of
U(c,k) may be greater than one.
R(c,k)class c response time at center k. The class c
residence time at center k is R(c,k) *
C(c,k). The total class c system response time is
dot(R, V, 2).
Q(c,k)average number of class c requests at center k. The
total number of requests at center k is
sum(Q(:,k)). The total number of class c
requests in the system is sum(Q(c,:)).
X(c,k)class c throughput at center k. The class c
throughput can be computed as X(c,1) / V(c,1).
NOTES
If the function call specifies the visit ratios V, then class switching is not allowed. If the function call specifies the routing probability matrix P, then class switching is allowed; however, in this case all nodes are restricted to be fixed rate servers or delay centers: multiple-server and general load-dependent centers are not supported.
In presence of load-dependent servers (e.g., if m(i)>1
for some i), the MVA algorithm is known to be numerically
unstable. Generally this problem shows up as negative values for the
computed response times or utilizations. This is not a problem with the
queueing package, but with the MVA algorithm;
as such, there is no known workaround at the moment (aoart from using a
different solution technique, if available). This function prints a
warning if it detects numerical problems; you can disable the warning
with the command warning("off", "qn:numerical-instability").
Given a network with K service centers, C job classes
and population vector {\bf N}=\left[N_1, …, N_C\right], the MVA
algorithm requires space O(C \prod_i (N_i + 1)). The time
complexity is O(CK\prod_i (N_i + 1)). This implementation is
slightly more space-efficient (see details in the code). While the
space requirement can be mitigated by using some optimizations, the
time complexity can not. If you need to analyze large closed networks
you should consider the qncmmvaap function, which implements
the approximate MVA algorithm. Note however that qncmmvaap
will only provide approximate results.
REFERENCES
This implementation is based on G. Bolch, S. Greiner, H. de Meer and K. Trivedi, Queueing Networks and Markov Chains: Modeling and Performance Evaluation with Computer Science Applications, Wiley, 1998 and Edward D. Lazowska, John Zahorjan, G. Scott Graham, and Kenneth C. Sevcik, Quantitative System Performance: Computer System Analysis Using Queueing Network Models, Prentice Hall, 1984. http://www.cs.washington.edu/homes/lazowska/qsp/. In particular, see section 7.4.2.1 ("Exact Solution Techniques").
See also: qnclosed, qncmmvaapprox, qncmvisits.
Approximate Mean Value Analysis (MVA) for closed, multiclass queueing networks with K service centers and C customer classes.
This implementation uses Bard and Schweitzer approximation. It is based on the assumption that the queue length at service center k with population set {\bf N}-{\bf 1}_c is approximated with
Q_k(N-1c) ~ (n-1)/n Q_k(N)
where \bf N is a valid population mix, {\bf N}-{\bf 1}_c is the population mix \bf N with one class c customer removed, and n = \sum_c N_c is the total number of requests.
This implementation works for networks with infinite server (IS) and single-server nodes only.
INPUTS
N(c)number of class c requests in the system (N(c) ≥ 0).
S(c,k)mean service time for class c customers at center k
(S(c,k) ≥ 0).
V(c,k)average number of visits of class c requests to center
k (V(c,k) ≥ 0).
m(k)number of servers at center k. If m(k) < 1,
then the service center k is assumed to be a delay center
(IS). If m(k) == 1, service center k is a
regular queueing center (FCFS, LCFS-PR or PS) with a single server
node. If omitted, each service center has a single server. Note
that multiple server nodes are not supported.
Z(c)class c external delay (Z ≥ 0). Default is 0.
tolStopping tolerance (tol>0). The algorithm stops if
the queue length computed on two subsequent iterations are less than
tol. Default is 10^{-5}.
iter_maxMaximum number of iterations (iter_max>0.
The function aborts if convergenge is not reached within the maximum
number of iterations. Default is 100.
OUTPUTS
U(c,k)If k is a FCFS, LCFS-PR or PS node, then U(c,k)
is the utilization of class c requests on service center
k. If k is an IS node, then U(c,k) is the
class c traffic intensity at device k,
defined as U(c,k) = X(c)*S(c,k)
R(c,k)response time of class c requests at service center k.
Q(c,k)average number of class c requests at service center k.
X(c,k)class c throughput at service center k.
REFERENCES
This implementation is based on Edward D. Lazowska, John Zahorjan, G. Scott Graham, and Kenneth C. Sevcik, Quantitative System Performance: Computer System Analysis Using Queueing Network Models, Prentice Hall, 1984. http://www.cs.washington.edu/homes/lazowska/qsp/. In particular, see section 7.4.2.2 ("Approximate Solution Techniques"). This implementation is slightly different from the one described above, as it computes the average response times R instead of the residence times.
See also: qncmmva.
Mean Value Analysis for mixed queueing networks. The network consists of K service centers (single-server or delay centers) and C independent customer chains. Both open and closed chains are possible. lambda is the vector of per-chain arrival rates (open classes); N is the vector of populations for closed chains.
Class switching is not allowed. Each customer class must correspond to an independent chain.
If the network is made of open or closed classes only, then this
function calls qnom or qncmmva respectively, and
prints a warning message.
INPUTS
lambda(c)N(c)For each customer chain c:
N(c)>0 is the
number of class c requests and lambda(c) must be
zero;
lambda(c)>0 is the arrival rate of class c
requests and N(c) must be zero;
In other words, for each class c the following must hold:
(lambda(c)>0 && N(c)==0) || (lambda(c)==0 && N(c)>0)
S(c,k)mean class c service time at center k,
S(c,k) ≥ 0. For FCFS nodes, service times must be
class-independent.
V(c,k)average number of visits of class c customers to center
k (V(c,k) ≥ 0).
m(k)number of servers at center k. Only single-server
(m(k)==1) or IS (Infinite Server) nodes
(m(k)<1) are supported. If omitted, each center is
assumed to be of type M/M/1-FCFS. Queueing discipline for
single-server nodes can be FCFS, PS or LCFS-PR.
OUTPUTS
U(c,k)class c utilization at center k.
R(c,k)class c response time at center k.
Q(c,k)average number of class c requests at center k.
X(c,k)class c throughput at center k.
REFERENCES
See also: qncmmva, qncm.
Next: Bounds Analysis, Previous: Multiple Class Models, Up: Queueing Networks [Contents][Index]
The queueing package provides a high-level function
qnsolve for analyzing QN models. qnsolve takes as
input a high-level description of the queueing model, and delegates
the actual solution of the model to one of the lower-level
function. qnsolve supports single or multiclass models, but at
the moment only product-form networks can be analyzed. For non
product-form networks See Non Product-Form QNs.
qnsolve accepts two input parameters. The first one is the list
of nodes, encoded as an Octave cell array. The second parameter
is the vector of visit ratios V, which can be either a vector
(for single-class models) or a two-dimensional matrix (for
multiple-class models).
Individual nodes in the network are structures build using the
qnmknode function.
Creates a node; this function can be used together with
qnsolve. It is possible to create either single-class nodes
(where there is only one customer class), or multiple-class nodes
(where the service time is given per-class). Furthermore, it is
possible to specify load-dependent service times. String literals
are case-insensitive, so for example "-/g/inf", "-/G/inf"
and "-/g/INF" are all equivalent.
INPUTS
SMean service time.
S(c) is assumed to
the the load-independent service time for class c customers.
S(n) is assumed to be
the class-independent service time at the node, when there are n
requests.
S(c,n) is assumed to be the class c service time
when there are n requests at the node.
mNumber of identical servers at the node. Default is m=1.
s2Squared coefficient of variation for the service time. Default is 1.0.
The returned struct Q should be considered opaque to the client.
See also: qnsolve.
After the network has been defined, it is possible to solve it using
qnsolve.
High-level function for analyzing QN models.
INPUTS
NN(c)Number of requests in the system for closed networks. For
single-class networks, N must be a scalar. For multiclass
networks, N(c) is the population size of closed class
c.
lambdalambda(c)External arrival rate (scalar) for open networks. For single-class
networks, lambda must be a scalar. For multiclass networks,
lambda(c) is the class c overall arrival rate.
QQ{i}List of queues in the network. This must be a cell array
with N elements, such that QQ{i} is
a struct produced by the qnmknode function.
ZExternal delay ("think time") for closed networks. Default 0.
OUTPUTS
U(k)If k is a FCFS node, then U(k) is the utilization
of service center k. If k is an IS node, then
U(k) is the traffic intensity defined as
X(k)*S(k).
R(k)average response time of service center k.
Q(k)average number of customers in service center k.
X(k)throughput of service center k.
Note that for multiclass networks, the computed results are per-class
utilization, response time, number of customers and throughput:
U(c,k), R(c,k), Q(c,k),
X(c,k).
String literals are case-insensitive, so "closed", "Closed" and "CLoSEd" are all equivalent.
EXAMPLE
Let us consider a closed, multiclass network with C=2 classes and K=3 service center. Let the population be M=(2, 1) (class 1 has 2 requests, and class 2 has 1 request). The nodes are as follows:
[0.2 0.1 0.1; 0.2 0.1 0.1]. Thus, S(1,2) =
0.2 means that service time for class 1 customers where there are 2
requests in 0.2. Note that service times are class-independent;
After defining the per-class visit count V such that
V(c,k) is the visit count of class c requests to
service center k. We can define and solve the model as
follows:
QQ = { qnmknode( "m/m/m-fcfs", [0.2 0.1 0.1; 0.2 0.1 0.1] ), ...
qnmknode( "-/g/1-ps", [0.4; 0.6] ), ...
qnmknode( "-/g/inf", [1; 2] ) };
V = [ 1 0.6 0.4; ...
1 0.3 0.7 ];
N = [ 2 1 ];
[U R Q X] = qnsolve( "closed", N, QQ, V );
This function computes steady-state performance measures of closed queueing networks using the Mean Value Analysis (MVA) algorithm. The qneneing network is allowed to contain fixed-capacity centers, delay centers or general load-dependent centers. Multiple request classes are supported.
This function dispatches the computation to one of
qncsemva, qncsmvald or qncmmva.
S(k)
is the average service time of center k, and this function
calls qncsmva which supports load-independent
service centers. If S is a matrix, S(k,i) is the
average service time at center k when i=1, …, N
jobs are present; in this case, the network is analyzed with the
qncmmvald function.
qncmmva function.
See also: qncsmva, qncsmvald, qncmmva.
EXAMPLE
P = [0 0.3 0.7; 1 0 0; 1 0 0]; # Transition probability matrix
S = [1 0.6 0.2]; # Average service times
m = ones(size(S)); # All centers are single-server
Z = 2; # External delay
N = 15; # Maximum population to consider
V = qncsvisits(P); # Compute number of visits
X_bsb_lower = X_bsb_upper = X_ab_lower = X_ab_upper = X_mva = zeros(1,N);
for n=1:N
[X_bsb_lower(n) X_bsb_upper(n)] = qncsbsb(n, S, V, m, Z);
[X_ab_lower(n) X_ab_upper(n)] = qncsaba(n, S, V, m, Z);
[U R Q X] = qnclosed( n, S, V, m, Z );
X_mva(n) = X(1)/V(1);
endfor
close all;
plot(1:N, X_ab_lower,"g;Asymptotic Bounds;", ...
1:N, X_bsb_lower,"k;Balanced System Bounds;", ...
1:N, X_mva,"b;MVA;", "linewidth", 2, ...
1:N, X_bsb_upper,"k", 1:N, X_ab_upper,"g" );
axis([1,N,0,1]); legend("location","southeast"); legend("boxoff");
xlabel("Number of Requests n"); ylabel("System Throughput X(n)");
Compute utilization, response time, average number of requests in the
system, and throughput for open queueing networks. If lambda is
a scalar, the network is considered a single-class QN and is solved
using qnopensingle. If lambda is a vector, the network
is considered as a multiclass QN and solved using qnopenmulti.
See also: qnos, qnom.
Next: QN Analysis Examples, Previous: Generic Algorithms, Up: Queueing Networks [Contents][Index]
Compute Asymptotic Bounds for open, single-class networks with K service centers.
INPUTS
lambdaArrival rate of requests (scalar, lambda ≥ 0).
D(k)service demand at center k.
(vector of length K, D(k) ≥ 0).
S(k)mean service time at center k.
(vector of length K, S(k) ≥ 0).
V(k)mean number of visits to center k.
(vector of length K, V(k) ≥ 0).
m(k)number of servers at center k.
This function only supports M/M/1 queues, therefore
m must be ones(size(S)).
OUTPUTS
XlXuLower and upper bounds on the system throughput. Xl is always set to 0 since there can be no lower bound on the throughput of open networks (scalar).
RlRuLower and upper bounds on the system response time. Ru
is always set to +inf since there can be no upper bound on the
throughput of open networks (scalar).
See also: qnomaba.
Compute Asymptotic Bounds for open, multiclass networks with K service centers and C customer classes.
INPUTS
lambda(c)class c arrival rate to the system (vector of length
C, lambda(c) > 0).
D(c, k)class c service demand at center k (C \times K
matrix, D(c, k) ≥ 0).
S(c, k)mean service time of class c requests at center k
(C \times K matrix, S(c, k) ≥ 0).
V(c, k)mean number of visits of class c requests at center k
(C \times K matrix, V(c, k) ≥ 0).
OUTPUTS
Xl(c)Xu(c)lower and upper bounds of class c throughput.
Xl(c) is always 0 since there can be no lower
bound on the throughput of open networks (vector of length
C).
Rl(c)Ru(c)lower and upper bounds of class c response time.
Ru(c) is always +inf since there can be no
upper bound on the response time of open networks (vector of length
C).
Compute Asymptotic Bounds for the system throughput and response time of closed, single-class networks with K service centers.
Single-server and infinite-server nodes are supported. Multiple-server nodes and general load-dependent servers are not supported.
INPUTS
Nnumber of requests in the system (scalar, N>0).
D(k)service demand at center k
(D(k) ≥ 0).
S(k)mean service time at center k
(S(k) ≥ 0).
V(k)average number of visits to center
k (V(k) ≥ 0).
m(k)number of servers at center k
(if m is a scalar, all centers have that number of servers). If
m(k) < 1, center k is a delay center (IS);
if m(k) = 1, center k is a M/M/1-FCFS server.
This function does not support multiple-server nodes. Default
is 1.
ZExternal delay (scalar, Z ≥ 0). Default is 0.
OUTPUTS
XlXuLower and upper bounds on the system throughput.
RlRuLower and upper bounds on the system response time.
See also: qncmaba.
Compute Asymptotic Bounds for closed, multiclass networks with K service centers and C customer classes. Single-server and infinite-server nodes are supported. Multiple-server nodes and general load-dependent servers are not supported.
INPUTS
N(c)number of class c requests in the system
(vector of length C, N(c) ≥ 0).
D(c, k)class c service demand
at center k (C \times K matrix, D(c,k) ≥ 0).
S(c, k)mean service time of class c
requests at center k (C \times K matrix, S(c,k) ≥ 0).
V(c,k)average number of visits of class c
requests to center k (C \times K matrix, V(c,k) ≥ 0).
m(k)number of servers at center k
(if m is a scalar, all centers have that number of servers). If
m(k) < 1, center k is a delay center (IS);
if m(k) = 1, center k is a M/M/1-FCFS server.
This function does not support multiple-server nodes. Default
is 1.
Z(c)class c external delay
(vector of length C, Z(c) ≥ 0). Default is 0.
OUTPUTS
Xl(c)Xu(c)Lower and upper bounds for class c throughput.
Rl(c)Ru(c)Lower and upper bounds for class c response time.
REFERENCES
See also: qncsaba.
Compute Balanced System Bounds for single-class, open networks with K service centers.
INPUTS
lambdaoverall arrival rate to the system (scalar, lambda ≥ 0).
D(k)service demand at center k (D(k) ≥ 0).
S(k)service time at center k (S(k) ≥ 0).
V(k)mean number of visits at center k (V(k) ≥ 0).
m(k)number of servers at center k. This function only supports
M/M/1 queues, therefore m must be
ones(size(S)).
OUTPUTS
XlXuLower and upper bounds on the system throughput. Xl is always set to 0, since there can be no lower bound on open networks throughput.
RlRuLower and upper bounds on the system response time.
See also: qnosaba.
Compute Balanced System Bounds on system throughput and response time for closed, single-class networks with K service centers.
INPUTS
Nnumber of requests in the system (scalar, N ≥ 0).
D(k)service demand at center k (D(k) ≥ 0).
S(k)mean service time at center k (S(k) ≥ 0).
V(k)average number of visits to center k (V(k)
≥ 0). Default is 1.
m(k)number of servers at center k. This function supports
m(k) = 1 only (single-eserver FCFS nodes); this
parameter is only for compatibility with qncsaba. Default is
1.
ZExternal delay (Z ≥ 0). Default is 0.
OUTPUTS
XlXuLower and upper bound on the system throughput.
RlRuLower and upper bound on the system response time.
REFERENCES
See also: qncmbsb.
Compute Balanced System Bounds for closed, multiclass networks with K service centers and C customer classes. Only single-server nodes are supported.
INPUTS
N(c)number of class c requests in the system (vector of length C).
D(c, k)class c service demand at center k (C \times K
matrix, D(c,k) ≥ 0).
S(c, k)mean service time of class c
requests at center k (C \times K matrix, S(c,k) ≥ 0).
V(c,k)average number of visits of class c
requests to center k (C \times K matrix, V(c,k) ≥ 0).
OUTPUTS
Xl(c)Xu(c)Lower and upper class c throughput bounds (vector of length C).
Rl(c)Ru(c)Lower and upper class c response time bounds (vector of length C).
See also: qncsbsb.
Compute Composite Bounds (CB) on system throughput and response time for closed multiclass networks.
INPUTS
N(c)number of class c requests in the system.
D(c, k)class c service demand
at center k (S(c,k) ≥ 0).
S(c, k)mean service time of class c
requests at center k (S(c,k) ≥ 0).
V(c,k)average number of visits of class c
requests to center k (V(c,k) ≥ 0).
OUTPUTS
Xl(c)Xu(c)Lower and upper bounds on class c throughput.
Rl(c)Ru(c)Lower and upper bounds on class c response time.
REFERENCES
Compute PB Bounds (C. H. Hsieh and S. Lam, 1987) for single-class, closed networks with K service centers.
INPUTS
number of requests in the system (scalar, N > 0).
D(k)service demand of service center k (D(k) ≥ 0).
S(k)mean service time at center k (S(k) ≥ 0).
V(k)visit ratio to center k (V(k) ≥ 0).
m(k)number of servers at center k. This function only supports
M/M/1 queues, therefore m must be
ones(size(S)).
Zexternal delay (think time, Z ≥ 0). Default 0.
OUTPUTS
XlXuLower and upper bounds on the system throughput.
RlRuLower and upper bounds on the system response time.
REFERENCES
This function implements the non-iterative variant described in G. Casale, R. R. Muntz, G. Serazzi, Geometric Bounds: a Non-Iterative Analysis Technique for Closed Queueing Networks, IEEE Transactions on Computers, 57(6):780-794, June 2008.
See also: qncsaba, qbcsbsb, qncsgb.
Compute Geometric Bounds (GB) on system throughput, system response time and server queue lenghts for closed, single-class networks with K service centers and N requests.
INPUTS
Nnumber of requests in the system (scalar, N > 0).
D(k)service demand of service center k (vector of length
K, D(k) ≥ 0).
S(k)mean service time at center k (vector of length K,
S(k) ≥ 0).
V(k)visit ratio to center k
(vector of length K, V(k) ≥ 0).
m(k)number of servers at center k. This function only supports
M/M/1 queues, therefore m must be
ones(size(S)).
Zexternal delay (think time, Z ≥ 0, scalar). Default is 0.
OUTPUTS
XlXuLower and upper bound on the system throughput. If Z>0,
these bounds are computed using Geometric Square-root Bounds
(GSB). If Z==0, these bounds are computed using Geometric Bounds (GB)
RlRuLower and upper bound on the system response time. These bounds
are derived from Xl and Xu using Little’s Law:
Rl = N / Xu - Z,
Ru = N / Xl - Z
Ql(k)Qu(k)lower and upper bounds of center K queue length.
REFERENCES
In this implementation we set X^+ and X^- as the upper
and lower Asymptotic Bounds as computed by the qncsab
function, respectively.
Previous: Bounds Analysis, Up: Queueing Networks [Contents][Index]
In this section we illustrate with a few examples how the
queueing package can be used to analyze queueing network
models. Further examples can be found in the functions demo blocks,
and can be inspected with the demo function Octave
command.
Let us consider again the network shown in Figure 5.1. We denote with S_k the average service time at center k, k=1, 2, 3. Let the service times be S_1 = 1.0, S_2 = 2.0 and S_3 = 0.8. The routing of jobs within the network is described with a routing probability matrix \bf P: a request completing service at center i is enqueued at center j with probability P_{i, j}. We use the following routing matrix:
/ 0 0.3 0.7 \
P = | 1 0 0 |
\ 1 0 0 /
The network above can be analyzed with the qnclosed function
see doc-qnclosed. qnclosed requires the following
parameters:
Number of requests in the network (since we are considering a closed network, the number of requests is fixed)
Array of average service times at the centers: S(k) is
the average service time at center k.
Array of visit ratios: V(k) is the average number of
visits to center k.
We can compute V_k from the routing probability matrix
P_{i, j} using the qncsvisits function
see doc-qncsvisits. Therefore, we can analyze the network for a
given population size N (e.g., N=10) as follows:
N = 10; S = [1 2 0.8]; P = [0 0.3 0.7; 1 0 0; 1 0 0]; V = qncsvisits(P); [U R Q X] = qnclosed( N, S, V ) ⇒ U = 0.99139 0.59483 0.55518 ⇒ R = 7.4360 4.7531 1.7500 ⇒ Q = 7.3719 1.4136 1.2144 ⇒ X = 0.99139 0.29742 0.69397
The output of qnclosed includes the vectors of utilizations
U_k at center k, response time R_k, average
number of customers Q_k and throughput X_k. In our
example, the throughput of center 1 is X_1 = 0.99139, and the
average number of requests in center 3 is Q_3 = 1.2144. The
utilization of center 1 is U_1 = 0.99139, which is the highest
among the service centers. Thus, center 1 is the bottleneck
device.
This network can also be analyzed with the qnsolve function
see doc-qnsolve. qnsolve can handle open, closed or
mixed networks, and allows the network to be described in a very
flexible way. First, let Q1, Q2 and Q3 be the
variables describing the service centers. Each variable is
instantiated with the qnmknode function.
Q1 = qnmknode( "m/m/m-fcfs", 1 ); Q2 = qnmknode( "m/m/m-fcfs", 2 ); Q3 = qnmknode( "m/m/m-fcfs", 0.8 );
The first parameter of qnmknode is a string describing the
type of the node; "m/m/m-fcfs" denotes a M/M/m–FCFS
center (this parameter is case-insensitive). The second parameter
gives the average service time. An optional third parameter can be
used to specify the number m of service centers. If omitted, it
is assumed m=1 (single-server node).
Now, the network can be analyzed as follows:
N = 10;
V = [1 0.3 0.7];
[U R Q X] = qnsolve( "closed", N, { Q1, Q2, Q3 }, V )
⇒ U = 0.99139 0.59483 0.55518
⇒ R = 7.4360 4.7531 1.7500
⇒ Q = 7.3719 1.4136 1.2144
⇒ X = 0.99139 0.29742 0.69397
Let us consider an open network with K=3 service centers and the following routing probabilities:
/ 0 0.3 0.5 \
P = ! 1 0 0 |
\ 1 0 0 /
In this network, requests can leave the system from center 1 with probability 1-(0.3+0.5) = 0.2. We suppose that external jobs arrive at center 1 with rate \lambda_1 = 0.15; there are no arrivals at centers 2 and 3.
Similarly to closed networks, we first compute the visit counts
V_k to center k, k = 1, 2, 3. We use the
qnosvisits function as follows:
P = [0 0.3 0.5; 1 0 0; 1 0 0]; lambda = [0.15 0 0]; V = qnosvisits(P, lambda) ⇒ V = 5.00000 1.50000 2.50000
where lambda(k) is the arrival rate at center k,
and \bf P is the routing matrix. Assuming the same service times as
in the previous example, the network can be analyzed with the
qnopen function see doc-qnopen, as follows:
S = [1 2 0.8]; [U R Q X] = qnopen( sum(lambda), S, V ) ⇒ U = 0.75000 0.45000 0.30000 ⇒ R = 4.0000 3.6364 1.1429 ⇒ Q = 3.00000 0.81818 0.42857 ⇒ X = 0.75000 0.22500 0.37500
The first parameter of the qnopen function is the (scalar)
aggregate arrival rate.
Again, it is possible to use the qnsolve high-level function:
Q1 = qnmknode( "m/m/m-fcfs", 1 );
Q2 = qnmknode( "m/m/m-fcfs", 2 );
Q3 = qnmknode( "m/m/m-fcfs", 0.8 );
lambda = [0.15 0 0];
[U R Q X] = qnsolve( "open", sum(lambda), { Q1, Q2, Q3 }, V )
⇒ U = 0.75000 0.45000 0.30000
⇒ R = 4.0000 3.6364 1.1429
⇒ Q = 3.00000 0.81818 0.42857
⇒ X = 0.75000 0.22500 0.37500
The following example is taken from Herb Schwetman, Implementing the Mean Value Algorithm for the Solution of Queueing Network Models, Technical Report CSD-TR-355, Department of Computer Sciences, Purdue University, Feb 15, 1982.
Let us consider the following multiclass QN with three servers and two classes
Servers 1 and 2 (labeled APL and IMS, respectively) are infinite server nodes; server 3 (labeled SYS) is Processor Sharing (PS). Mean service times are given in the following table:
| APL | IMS | SYS | |
|---|---|---|---|
| Class 1 | 1 | - | 0.025 |
| Class 2 | - | 15 | 0.500 |
There is no class switching. If we assume a population of 15 requests for class 1, and 5 requests for class 2, then the model can be analyzed as follows:
S = [1 0 .025; 0 15 .5]; P = zeros(2,3,2,3); P(1,1,1,3) = P(1,3,1,1) = 1; P(2,2,2,3) = P(2,3,2,2) = 1; V = qncmvisits(P,[3 3]); # reference station is station 3 N = [15 5]; m = [-1 -1 1]; [U R Q X] = qncmmva(N,S,V,m)
⇒
U =
14.32312 0.00000 0.35808
0.00000 4.70699 0.15690
R =
1.00000 0.00000 0.04726
0.00000 15.00000 0.93374
Q =
14.32312 0.00000 0.67688
0.00000 4.70699 0.29301
X =
14.32312 0.00000 14.32312
0.00000 0.31380 0.31380
The following example is from M. Marzolla, The qnetworks Toolbox: A Software Package for Queueing Networks Analysis, Technical Report UBLCS-2010-04, Department of Computer Science, University of Bologna, Italy, February 2010.
The model shown in Figure 5.4 shows a three-tier enterprise system with K=6 service centers. The first tier contains the Web server (node 1), which is responsible for generating Web pages and transmitting them to clients. The application logic is implemented by nodes 2 and 3, and the storage tier is made of nodes 4–6.The system is subject to two workload classes, both represented as closed populations of N_1 and N_2 requests, respectively. Let D_{c, k} denote the service demand of class c requests at center k. We use the parameter values:
| Serv. no. | Name | Class 1 | Class 2 |
|---|---|---|---|
| 1 | Web Server | 12 | 2 |
| 2 | App. Server 1 | 14 | 20 |
| 3 | App. Server 2 | 23 | 14 |
| 4 | DB Server 1 | 20 | 90 |
| 5 | DB Server 2 | 80 | 30 |
| 6 | DB Server 3 | 31 | 33 |
We set the total number of requests to 100, that is N_1 + N_2 = N = 100, and we study how different population mixes (N_1, N_2) affect the system throughput and response time. Let 0 < \beta_1 < 1 denote the fraction of class 1 requests: N_1 = \beta_1 N, N_2 = (1-\beta_1)N. The following Octave code defines the model for \beta_1 = 0.1:
N = 100; # total population size
beta1 = 0.1; # fraction of class 1 reqs.
S = [12 14 23 20 80 31; \
2 20 14 90 30 33 ];
V = ones(size(S));
pop = [fix(beta1*N) N-fix(beta1*N)];
[U R Q X] = qncmmva(pop, S, V);
The qncmmva(pop, S, V) function invocation uses the
multiclass MVA algorithm to compute per-class utilizations U_{c,
k}, response times R_{c,k}, mean queue lengths Q_{c,k}
and throughputs X_{c,k} at each service center k, given
a population vector pop, mean service times S and visit
ratios V. Since we are given the service demands D_{c, k}
= S_{c, k} V_{c,k}, but function qncmmva requires separate
service times and visit ratios, we set the service times equal to the
demands, and all visit ratios equal to one. Overall class and system
throughputs and response times can also be computed:
X1 = X(1,1) / V(1,1) # class 1 throughput
⇒ X1 = 0.0044219
X2 = X(2,1) / V(2,1) # class 2 throughput
⇒ X2 = 0.010128
XX = X1 + X2 # system throughput
⇒ XX = 0.014550
R1 = dot(R(1,:), V(1,:)) # class 1 resp. time
⇒ R1 = 2261.5
R2 = dot(R(2,:), V(2,:)) # class 2 resp. time
⇒ R2 = 8885.9
RR = N / XX # system resp. time
⇒ RR = 6872.7
dot(X,Y) computes the dot product of two vectors.
R(1,:) is the first row of matrix R and V(1,:) is
the first row of matrix V, so dot(R(1,:), V(1,:))
computes \sum_k R_{1,k} V_{1,k}.
We can also compute the system power \Phi = X / R, which defines how efficiently resources are being used: high values of \Phi denote the desirable situation of high throughput and low response time. Figure 5.6 shows \Phi as a function of \beta_1. We observe a “plateau” of the global system power, corresponding to values of \beta_1 which approximately lie between 0.3 and 0.7. The per-class power exhibits an interesting (although not completely surprising) pattern, where the class with higher population exhibits worst efficiency as it produces higher contention on the resources.
We now consider an example of multiclass network with class switching. The example is taken from Sch82, and is shown in Figure Figure 5.7.
The system consists of three devices and two job classes. The CPU node is a PS server, while the two nodes labeled I/O are FCFS. Class 1 mean service time at the CPU is 0.01; class 2 mean service time at the CPU is 0.05. The mean service time at node 2 is 0.1, and is class-independent. Similarly, the mean service time at node 3 is 0.07. Jobs in class 1 leave the CPU and join class 2 with probability 0.1; jobs of class 2 leave the CPU and join class 1 with probability 0.2. There are N=3 jobs, which are initially allocated to class 1. However, note that since class switching is allowed, the total number of jobs in each class does not remain constant; however the total number of jobs does.
C = 2; K = 3;
S = [.01 .07 .10; ...
.05 .07 .10 ];
P = zeros(C,K,C,K);
P(1,1,1,2) = .7; P(1,1,1,3) = .2; P(1,1,2,1) = .1;
P(2,1,2,2) = .3; P(2,1,2,3) = .5; P(2,1,1,1) = .2;
P(1,2,1,1) = P(2,2,2,1) = 1;
P(1,3,1,1) = P(2,3,2,1) = 1;
N = [3 0];
[U R Q X] = qncmmva(N, S, P)
⇒
U =
0.12609 0.61784 0.25218
0.31522 0.13239 0.31522
R =
0.014653 0.133148 0.163256
0.073266 0.133148 0.163256
Q =
0.18476 1.17519 0.41170
0.46190 0.25183 0.51462
X =
12.6089 8.8262 2.5218
6.3044 1.8913 3.1522
Next: Copying, Previous: Queueing Networks, Up: Top [Contents][Index]
Ian F. Akyildiz, Mean Value Analysis for Blocking Queueing Networks, IEEE Transactions on Software Engineering, vol. 14, n. 2, april 1988, pp. 418–428. DOI 10.1109/32.4663
Y. Bard, Some Extensions to Multiclass Queueing Network Analysis, proc. 4th Int. Symp. on Modelling and Performance Evaluation of Computer Systems, feb. 1979, pp. 51–62.
F. Baskett, K. Mani Chandy, R. R. Muntz, and F. G. Palacios. 1975. Open, Closed, and Mixed Networks of Queues with Different Classes of Customers. J. ACM 22, 2 (April 1975), 248â260, DOI 10.1145/321879.321887
G. Bolch, S. Greiner, H. de Meer and K. Trivedi, Queueing Networks and Markov Chains: Modeling and Performance Evaluation with Computer Science Applications, Wiley, 1998.
J. P. Buzen, Computational Algorithms for Closed Queueing Networks with Exponential Servers, Communications of the ACM, volume 16, number 9, september 1973, pp. 527–531. DOI 10.1145/362342.362345
G. Casale, A note on stable flow-equivalent aggregation in closed networks. Queueing Syst. Theory Appl., 60:193â-202, December 2008, DOI 10.1007/s11134-008-9093-6
G. Casale, R. R. Muntz, G. Serazzi, Geometric Bounds: a Non-Iterative Analysis Technique for Closed Queueing Networks, IEEE Transactions on Computers, 57(6):780-794, June 2008. DOI 10.1109/TC.2008.37
C. M. Grinstead, J. L. Snell, (July 1997). Introduction to Probability. American Mathematical Society. ISBN 978-0821807491; this excellent textbook is available in PDF format and can be used under the terms of the GNU Free Documentation License (FDL)
J. R. Jackson, Jobshop-Like Queueing Systems, Vol. 50, No. 12, Ten Most Influential Titles of "Management Science’s" First Fifty Years (Dec., 2004), pp. 1796-1802, available online
R. Jain, The Art of Computer Systems Performance Analysis, Wiley, 1991, p. 577.
C. H. Hsieh and S. Lam, Two classes of performance bounds for closed queueing networks, PEVA, vol. 7, n. 1, pp. 3–30, 1987
T. Kerola, The Composite Bound Method (CBM) for Computing Throughput Bounds in Multiple Class Environments, Performance Evaluation, Vol. 6 Isue 1, March 1986, DOI 10.1016/0166-5316(86)90002-7; also available as Technical Report CSD-TR-475, Department of Computer Sciences, Purdue University, mar 13, 1984 (Revised aug 27, 1984).
E. D. Lazowska, J. Zahorjan, G. Scott Graham, and K. C. Sevcik, Quantitative System Performance: Computer System Analysis Using Queueing Network Models, Prentice Hall, 1984. available online.
M. Reiser, H. Kobayashi, On The Convolution Algorithm for Separable Queueing Networks, In Proceedings of the 1976 ACM SIGMETRICS Conference on Computer Performance Modeling Measurement and Evaluation (Cambridge, Massachusetts, United States, March 29–31, 1976). SIGMETRICS ’76. ACM, New York, NY, pp. 109–117. DOI 10.1145/800200.806187
M. Reiser and S. S. Lavenberg, Mean-Value Analysis of Closed Multichain Queuing Networks, Journal of the ACM, vol. 27, n. 2, April 1980, pp. 313–322. DOI 10.1145/322186.322195
P. Schweitzer, Approximate Analysis of Multiclass Closed Networks of Queues, Proc. Int. Conf. on Stochastic Control and Optimization, jun 1979, pp. 25â29
H. D. Schwetman, Testing Network-of-Queues Software, Technical Report CSD-TR 330, Department of computer Sciences, Purdue University, 1980
H. D. Schwetman, Some Computational Aspects of Queueing Network Models, Technical Report CSD-TR-354, Department of Computer Sciences, Purdue University, feb, 1981 (revised).
H. D. Schwetman, Implementing the Mean Value Algorithm for the Solution of Queueing Network Models, Technical Report CSD-TR-355, Department of Computer Sciences, Purdue University, feb 15, 1982.
T. Kerola, H. D. Schwetman, Performance Bounds for Multiclass Models, Technical Report CSD-TR-479, Department of Computer Sciences, Purdue University, 1984.
H. C. Tijms, A first course in stochastic models, John Wiley and Sons, 2003, ISBN 0471498807, ISBN 9780471498803, DOI 10.1002/047001363X
J. Zahorjan and E. Wong, The solution of separable queueing network models using mean value analysis. SIGMETRICS Perform. Eval. Rev. 10, 3 (Sep. 1981), 80-85. DOI 10.1145/1010629.805477
G. Zeng, Two common properties of the erlang-B function, erlang-C function, and Engset blocking function, Mathematical and Computer Modelling, Volume 37, Issues 12-13, June 2003, Pages 1287-1296 DOI 10.1016/S0895-7177(03)90040-9
Next: Concept Index, Previous: References, Up: Top [Contents][Index]
Copyright © 2007 Free Software Foundation, Inc. http://fsf.org/ Everyone is permitted to copy and distribute verbatim copies of this license document, but changing it is not allowed.
The GNU General Public License is a free, copyleft license for software and other kinds of works.
The licenses for most software and other practical works are designed to take away your freedom to share and change the works. By contrast, the GNU General Public License is intended to guarantee your freedom to share and change all versions of a program—to make sure it remains free software for all its users. We, the Free Software Foundation, use the GNU General Public License for most of our software; it applies also to any other work released this way by its authors. You can apply it to your programs, too.
When we speak of free software, we are referring to freedom, not price. Our General Public Licenses are designed to make sure that you have the freedom to distribute copies of free software (and charge for them if you wish), that you receive source code or can get it if you want it, that you can change the software or use pieces of it in new free programs, and that you know you can do these things.
To protect your rights, we need to prevent others from denying you these rights or asking you to surrender the rights. Therefore, you have certain responsibilities if you distribute copies of the software, or if you modify it: responsibilities to respect the freedom of others.
For example, if you distribute copies of such a program, whether gratis or for a fee, you must pass on to the recipients the same freedoms that you received. You must make sure that they, too, receive or can get the source code. And you must show them these terms so they know their rights.
Developers that use the GNU GPL protect your rights with two steps: (1) assert copyright on the software, and (2) offer you this License giving you legal permission to copy, distribute and/or modify it.
For the developers’ and authors’ protection, the GPL clearly explains that there is no warranty for this free software. For both users’ and authors’ sake, the GPL requires that modified versions be marked as changed, so that their problems will not be attributed erroneously to authors of previous versions.
Some devices are designed to deny users access to install or run modified versions of the software inside them, although the manufacturer can do so. This is fundamentally incompatible with the aim of protecting users’ freedom to change the software. The systematic pattern of such abuse occurs in the area of products for individuals to use, which is precisely where it is most unacceptable. Therefore, we have designed this version of the GPL to prohibit the practice for those products. If such problems arise substantially in other domains, we stand ready to extend this provision to those domains in future versions of the GPL, as needed to protect the freedom of users.
Finally, every program is threatened constantly by software patents. States should not allow patents to restrict development and use of software on general-purpose computers, but in those that do, we wish to avoid the special danger that patents applied to a free program could make it effectively proprietary. To prevent this, the GPL assures that patents cannot be used to render the program non-free.
The precise terms and conditions for copying, distribution and modification follow.
“This License” refers to version 3 of the GNU General Public License.
“Copyright” also means copyright-like laws that apply to other kinds of works, such as semiconductor masks.
“The Program” refers to any copyrightable work licensed under this License. Each licensee is addressed as “you”. “Licensees” and “recipients” may be individuals or organizations.
To “modify” a work means to copy from or adapt all or part of the work in a fashion requiring copyright permission, other than the making of an exact copy. The resulting work is called a “modified version” of the earlier work or a work “based on” the earlier work.
A “covered work” means either the unmodified Program or a work based on the Program.
To “propagate” a work means to do anything with it that, without permission, would make you directly or secondarily liable for infringement under applicable copyright law, except executing it on a computer or modifying a private copy. Propagation includes copying, distribution (with or without modification), making available to the public, and in some countries other activities as well.
To “convey” a work means any kind of propagation that enables other parties to make or receive copies. Mere interaction with a user through a computer network, with no transfer of a copy, is not conveying.
An interactive user interface displays “Appropriate Legal Notices” to the extent that it includes a convenient and prominently visible feature that (1) displays an appropriate copyright notice, and (2) tells the user that there is no warranty for the work (except to the extent that warranties are provided), that licensees may convey the work under this License, and how to view a copy of this License. If the interface presents a list of user commands or options, such as a menu, a prominent item in the list meets this criterion.
The “source code” for a work means the preferred form of the work for making modifications to it. “Object code” means any non-source form of a work.
A “Standard Interface” means an interface that either is an official standard defined by a recognized standards body, or, in the case of interfaces specified for a particular programming language, one that is widely used among developers working in that language.
The “System Libraries” of an executable work include anything, other than the work as a whole, that (a) is included in the normal form of packaging a Major Component, but which is not part of that Major Component, and (b) serves only to enable use of the work with that Major Component, or to implement a Standard Interface for which an implementation is available to the public in source code form. A “Major Component”, in this context, means a major essential component (kernel, window system, and so on) of the specific operating system (if any) on which the executable work runs, or a compiler used to produce the work, or an object code interpreter used to run it.
The “Corresponding Source” for a work in object code form means all the source code needed to generate, install, and (for an executable work) run the object code and to modify the work, including scripts to control those activities. However, it does not include the work’s System Libraries, or general-purpose tools or generally available free programs which are used unmodified in performing those activities but which are not part of the work. For example, Corresponding Source includes interface definition files associated with source files for the work, and the source code for shared libraries and dynamically linked subprograms that the work is specifically designed to require, such as by intimate data communication or control flow between those subprograms and other parts of the work.
The Corresponding Source need not include anything that users can regenerate automatically from other parts of the Corresponding Source.
The Corresponding Source for a work in source code form is that same work.
All rights granted under this License are granted for the term of copyright on the Program, and are irrevocable provided the stated conditions are met. This License explicitly affirms your unlimited permission to run the unmodified Program. The output from running a covered work is covered by this License only if the output, given its content, constitutes a covered work. This License acknowledges your rights of fair use or other equivalent, as provided by copyright law.
You may make, run and propagate covered works that you do not convey, without conditions so long as your license otherwise remains in force. You may convey covered works to others for the sole purpose of having them make modifications exclusively for you, or provide you with facilities for running those works, provided that you comply with the terms of this License in conveying all material for which you do not control copyright. Those thus making or running the covered works for you must do so exclusively on your behalf, under your direction and control, on terms that prohibit them from making any copies of your copyrighted material outside their relationship with you.
Conveying under any other circumstances is permitted solely under the conditions stated below. Sublicensing is not allowed; section 10 makes it unnecessary.
No covered work shall be deemed part of an effective technological measure under any applicable law fulfilling obligations under article 11 of the WIPO copyright treaty adopted on 20 December 1996, or similar laws prohibiting or restricting circumvention of such measures.
When you convey a covered work, you waive any legal power to forbid circumvention of technological measures to the extent such circumvention is effected by exercising rights under this License with respect to the covered work, and you disclaim any intention to limit operation or modification of the work as a means of enforcing, against the work’s users, your or third parties’ legal rights to forbid circumvention of technological measures.
You may convey verbatim copies of the Program’s source code as you receive it, in any medium, provided that you conspicuously and appropriately publish on each copy an appropriate copyright notice; keep intact all notices stating that this License and any non-permissive terms added in accord with section 7 apply to the code; keep intact all notices of the absence of any warranty; and give all recipients a copy of this License along with the Program.
You may charge any price or no price for each copy that you convey, and you may offer support or warranty protection for a fee.
You may convey a work based on the Program, or the modifications to produce it from the Program, in the form of source code under the terms of section 4, provided that you also meet all of these conditions:
A compilation of a covered work with other separate and independent works, which are not by their nature extensions of the covered work, and which are not combined with it such as to form a larger program, in or on a volume of a storage or distribution medium, is called an “aggregate” if the compilation and its resulting copyright are not used to limit the access or legal rights of the compilation’s users beyond what the individual works permit. Inclusion of a covered work in an aggregate does not cause this License to apply to the other parts of the aggregate.
You may convey a covered work in object code form under the terms of sections 4 and 5, provided that you also convey the machine-readable Corresponding Source under the terms of this License, in one of these ways:
A separable portion of the object code, whose source code is excluded from the Corresponding Source as a System Library, need not be included in conveying the object code work.
A “User Product” is either (1) a “consumer product”, which means any tangible personal property which is normally used for personal, family, or household purposes, or (2) anything designed or sold for incorporation into a dwelling. In determining whether a product is a consumer product, doubtful cases shall be resolved in favor of coverage. For a particular product received by a particular user, “normally used” refers to a typical or common use of that class of product, regardless of the status of the particular user or of the way in which the particular user actually uses, or expects or is expected to use, the product. A product is a consumer product regardless of whether the product has substantial commercial, industrial or non-consumer uses, unless such uses represent the only significant mode of use of the product.
“Installation Information” for a User Product means any methods, procedures, authorization keys, or other information required to install and execute modified versions of a covered work in that User Product from a modified version of its Corresponding Source. The information must suffice to ensure that the continued functioning of the modified object code is in no case prevented or interfered with solely because modification has been made.
If you convey an object code work under this section in, or with, or specifically for use in, a User Product, and the conveying occurs as part of a transaction in which the right of possession and use of the User Product is transferred to the recipient in perpetuity or for a fixed term (regardless of how the transaction is characterized), the Corresponding Source conveyed under this section must be accompanied by the Installation Information. But this requirement does not apply if neither you nor any third party retains the ability to install modified object code on the User Product (for example, the work has been installed in ROM).
The requirement to provide Installation Information does not include a requirement to continue to provide support service, warranty, or updates for a work that has been modified or installed by the recipient, or for the User Product in which it has been modified or installed. Access to a network may be denied when the modification itself materially and adversely affects the operation of the network or violates the rules and protocols for communication across the network.
Corresponding Source conveyed, and Installation Information provided, in accord with this section must be in a format that is publicly documented (and with an implementation available to the public in source code form), and must require no special password or key for unpacking, reading or copying.
“Additional permissions” are terms that supplement the terms of this License by making exceptions from one or more of its conditions. Additional permissions that are applicable to the entire Program shall be treated as though they were included in this License, to the extent that they are valid under applicable law. If additional permissions apply only to part of the Program, that part may be used separately under those permissions, but the entire Program remains governed by this License without regard to the additional permissions.
When you convey a copy of a covered work, you may at your option remove any additional permissions from that copy, or from any part of it. (Additional permissions may be written to require their own removal in certain cases when you modify the work.) You may place additional permissions on material, added by you to a covered work, for which you have or can give appropriate copyright permission.
Notwithstanding any other provision of this License, for material you add to a covered work, you may (if authorized by the copyright holders of that material) supplement the terms of this License with terms:
All other non-permissive additional terms are considered “further restrictions” within the meaning of section 10. If the Program as you received it, or any part of it, contains a notice stating that it is governed by this License along with a term that is a further restriction, you may remove that term. If a license document contains a further restriction but permits relicensing or conveying under this License, you may add to a covered work material governed by the terms of that license document, provided that the further restriction does not survive such relicensing or conveying.
If you add terms to a covered work in accord with this section, you must place, in the relevant source files, a statement of the additional terms that apply to those files, or a notice indicating where to find the applicable terms.
Additional terms, permissive or non-permissive, may be stated in the form of a separately written license, or stated as exceptions; the above requirements apply either way.
You may not propagate or modify a covered work except as expressly provided under this License. Any attempt otherwise to propagate or modify it is void, and will automatically terminate your rights under this License (including any patent licenses granted under the third paragraph of section 11).
However, if you cease all violation of this License, then your license from a particular copyright holder is reinstated (a) provisionally, unless and until the copyright holder explicitly and finally terminates your license, and (b) permanently, if the copyright holder fails to notify you of the violation by some reasonable means prior to 60 days after the cessation.
Moreover, your license from a particular copyright holder is reinstated permanently if the copyright holder notifies you of the violation by some reasonable means, this is the first time you have received notice of violation of this License (for any work) from that copyright holder, and you cure the violation prior to 30 days after your receipt of the notice.
Termination of your rights under this section does not terminate the licenses of parties who have received copies or rights from you under this License. If your rights have been terminated and not permanently reinstated, you do not qualify to receive new licenses for the same material under section 10.
You are not required to accept this License in order to receive or run a copy of the Program. Ancillary propagation of a covered work occurring solely as a consequence of using peer-to-peer transmission to receive a copy likewise does not require acceptance. However, nothing other than this License grants you permission to propagate or modify any covered work. These actions infringe copyright if you do not accept this License. Therefore, by modifying or propagating a covered work, you indicate your acceptance of this License to do so.
Each time you convey a covered work, the recipient automatically receives a license from the original licensors, to run, modify and propagate that work, subject to this License. You are not responsible for enforcing compliance by third parties with this License.
An “entity transaction” is a transaction transferring control of an organization, or substantially all assets of one, or subdividing an organization, or merging organizations. If propagation of a covered work results from an entity transaction, each party to that transaction who receives a copy of the work also receives whatever licenses to the work the party’s predecessor in interest had or could give under the previous paragraph, plus a right to possession of the Corresponding Source of the work from the predecessor in interest, if the predecessor has it or can get it with reasonable efforts.
You may not impose any further restrictions on the exercise of the rights granted or affirmed under this License. For example, you may not impose a license fee, royalty, or other charge for exercise of rights granted under this License, and you may not initiate litigation (including a cross-claim or counterclaim in a lawsuit) alleging that any patent claim is infringed by making, using, selling, offering for sale, or importing the Program or any portion of it.
A “contributor” is a copyright holder who authorizes use under this License of the Program or a work on which the Program is based. The work thus licensed is called the contributor’s “contributor version”.
A contributor’s “essential patent claims” are all patent claims owned or controlled by the contributor, whether already acquired or hereafter acquired, that would be infringed by some manner, permitted by this License, of making, using, or selling its contributor version, but do not include claims that would be infringed only as a consequence of further modification of the contributor version. For purposes of this definition, “control” includes the right to grant patent sublicenses in a manner consistent with the requirements of this License.
Each contributor grants you a non-exclusive, worldwide, royalty-free patent license under the contributor’s essential patent claims, to make, use, sell, offer for sale, import and otherwise run, modify and propagate the contents of its contributor version.
In the following three paragraphs, a “patent license” is any express agreement or commitment, however denominated, not to enforce a patent (such as an express permission to practice a patent or covenant not to sue for patent infringement). To “grant” such a patent license to a party means to make such an agreement or commitment not to enforce a patent against the party.
If you convey a covered work, knowingly relying on a patent license, and the Corresponding Source of the work is not available for anyone to copy, free of charge and under the terms of this License, through a publicly available network server or other readily accessible means, then you must either (1) cause the Corresponding Source to be so available, or (2) arrange to deprive yourself of the benefit of the patent license for this particular work, or (3) arrange, in a manner consistent with the requirements of this License, to extend the patent license to downstream recipients. “Knowingly relying” means you have actual knowledge that, but for the patent license, your conveying the covered work in a country, or your recipient’s use of the covered work in a country, would infringe one or more identifiable patents in that country that you have reason to believe are valid.
If, pursuant to or in connection with a single transaction or arrangement, you convey, or propagate by procuring conveyance of, a covered work, and grant a patent license to some of the parties receiving the covered work authorizing them to use, propagate, modify or convey a specific copy of the covered work, then the patent license you grant is automatically extended to all recipients of the covered work and works based on it.
A patent license is “discriminatory” if it does not include within the scope of its coverage, prohibits the exercise of, or is conditioned on the non-exercise of one or more of the rights that are specifically granted under this License. You may not convey a covered work if you are a party to an arrangement with a third party that is in the business of distributing software, under which you make payment to the third party based on the extent of your activity of conveying the work, and under which the third party grants, to any of the parties who would receive the covered work from you, a discriminatory patent license (a) in connection with copies of the covered work conveyed by you (or copies made from those copies), or (b) primarily for and in connection with specific products or compilations that contain the covered work, unless you entered into that arrangement, or that patent license was granted, prior to 28 March 2007.
Nothing in this License shall be construed as excluding or limiting any implied license or other defenses to infringement that may otherwise be available to you under applicable patent law.
If conditions are imposed on you (whether by court order, agreement or otherwise) that contradict the conditions of this License, they do not excuse you from the conditions of this License. If you cannot convey a covered work so as to satisfy simultaneously your obligations under this License and any other pertinent obligations, then as a consequence you may not convey it at all. For example, if you agree to terms that obligate you to collect a royalty for further conveying from those to whom you convey the Program, the only way you could satisfy both those terms and this License would be to refrain entirely from conveying the Program.
Notwithstanding any other provision of this License, you have permission to link or combine any covered work with a work licensed under version 3 of the GNU Affero General Public License into a single combined work, and to convey the resulting work. The terms of this License will continue to apply to the part which is the covered work, but the special requirements of the GNU Affero General Public License, section 13, concerning interaction through a network will apply to the combination as such.
The Free Software Foundation may publish revised and/or new versions of the GNU General Public License from time to time. Such new versions will be similar in spirit to the present version, but may differ in detail to address new problems or concerns.
Each version is given a distinguishing version number. If the Program specifies that a certain numbered version of the GNU General Public License “or any later version” applies to it, you have the option of following the terms and conditions either of that numbered version or of any later version published by the Free Software Foundation. If the Program does not specify a version number of the GNU General Public License, you may choose any version ever published by the Free Software Foundation.
If the Program specifies that a proxy can decide which future versions of the GNU General Public License can be used, that proxy’s public statement of acceptance of a version permanently authorizes you to choose that version for the Program.
Later license versions may give you additional or different permissions. However, no additional obligations are imposed on any author or copyright holder as a result of your choosing to follow a later version.
THERE IS NO WARRANTY FOR THE PROGRAM, TO THE EXTENT PERMITTED BY APPLICABLE LAW. EXCEPT WHEN OTHERWISE STATED IN WRITING THE COPYRIGHT HOLDERS AND/OR OTHER PARTIES PROVIDE THE PROGRAM “AS IS” WITHOUT WARRANTY OF ANY KIND, EITHER EXPRESSED OR IMPLIED, INCLUDING, BUT NOT LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE. THE ENTIRE RISK AS TO THE QUALITY AND PERFORMANCE OF THE PROGRAM IS WITH YOU. SHOULD THE PROGRAM PROVE DEFECTIVE, YOU ASSUME THE COST OF ALL NECESSARY SERVICING, REPAIR OR CORRECTION.
IN NO EVENT UNLESS REQUIRED BY APPLICABLE LAW OR AGREED TO IN WRITING WILL ANY COPYRIGHT HOLDER, OR ANY OTHER PARTY WHO MODIFIES AND/OR CONVEYS THE PROGRAM AS PERMITTED ABOVE, BE LIABLE TO YOU FOR DAMAGES, INCLUDING ANY GENERAL, SPECIAL, INCIDENTAL OR CONSEQUENTIAL DAMAGES ARISING OUT OF THE USE OR INABILITY TO USE THE PROGRAM (INCLUDING BUT NOT LIMITED TO LOSS OF DATA OR DATA BEING RENDERED INACCURATE OR LOSSES SUSTAINED BY YOU OR THIRD PARTIES OR A FAILURE OF THE PROGRAM TO OPERATE WITH ANY OTHER PROGRAMS), EVEN IF SUCH HOLDER OR OTHER PARTY HAS BEEN ADVISED OF THE POSSIBILITY OF SUCH DAMAGES.
If the disclaimer of warranty and limitation of liability provided above cannot be given local legal effect according to their terms, reviewing courts shall apply local law that most closely approximates an absolute waiver of all civil liability in connection with the Program, unless a warranty or assumption of liability accompanies a copy of the Program in return for a fee.
If you develop a new program, and you want it to be of the greatest possible use to the public, the best way to achieve this is to make it free software which everyone can redistribute and change under these terms.
To do so, attach the following notices to the program. It is safest to attach them to the start of each source file to most effectively state the exclusion of warranty; and each file should have at least the “copyright” line and a pointer to where the full notice is found.
one line to give the program's name and a brief idea of what it does. Copyright (C) year name of author This program is free software: you can redistribute it and/or modify it under the terms of the GNU General Public License as published by the Free Software Foundation, either version 3 of the License, or (at your option) any later version. This program is distributed in the hope that it will be useful, but WITHOUT ANY WARRANTY; without even the implied warranty of MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the GNU General Public License for more details. You should have received a copy of the GNU General Public License along with this program. If not, see http://www.gnu.org/licenses/.
Also add information on how to contact you by electronic and paper mail.
If the program does terminal interaction, make it output a short notice like this when it starts in an interactive mode:
program Copyright (C) year name of author This program comes with ABSOLUTELY NO WARRANTY; for details type ‘show w’. This is free software, and you are welcome to redistribute it under certain conditions; type ‘show c’ for details.
The hypothetical commands ‘show w’ and ‘show c’ should show the appropriate parts of the General Public License. Of course, your program’s commands might be different; for a GUI interface, you would use an “about box”.
You should also get your employer (if you work as a programmer) or school, if any, to sign a “copyright disclaimer” for the program, if necessary. For more information on this, and how to apply and follow the GNU GPL, see http://www.gnu.org/licenses/.
The GNU General Public License does not permit incorporating your program into proprietary programs. If your program is a subroutine library, you may consider it more useful to permit linking proprietary applications with the library. If this is what you want to do, use the GNU Lesser General Public License instead of this License. But first, please read http://www.gnu.org/philosophy/why-not-lgpl.html.
Next: Function Index, Previous: Copying, Up: Top [Contents][Index]
| Jump to: | A B C D E F G I L M N O P Q R S T U W |
|---|
| Jump to: | A B C D E F G I L M N O P Q R S T U W |
|---|
Previous: Concept Index, Up: Top [Contents][Index]
| Jump to: | C D E Q |
|---|
| Jump to: | C D E Q |
|---|